











- ANALIZA
USA: Okręty LCS nadal bez docelowego uzbrojenia przeciwminowego


Amerykanie poinformowali o zakończeniu kolejnego etapu badań modułu zadaniowego MCM MP, który ma dać okrętom do działań przybrzeżnych typu LCS możliwość zwalczania min. Komunikat o sukcesie jest jednak jednocześnie przyznaniem się, że od wprowadzenia pierwszej jednostki LCS w 2008 roku nadal nie opracowano dla tego rodzaju okrętów odpowiedniego wyposażenia.
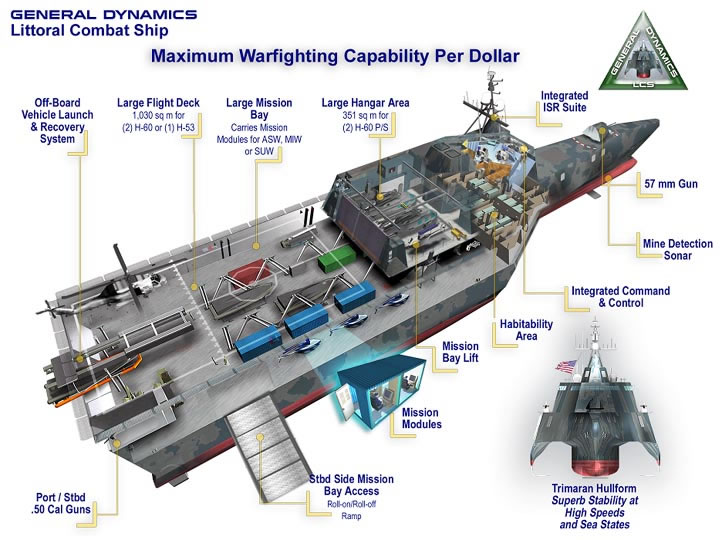
Zgodnie z założeniem programu LCS (Littoral Combat Ship), amerykańska marynarka miała otrzymywać okręty do działań przybrzeżnych tylko z wyposażeniem bazowym (stąd niekiedy używana w odniesieniu do tych okrętów nazwa „Sea frame” – okręt szkieletowy). Misje szczegółowe miały być natomiast realizowane po dostarczeniu na te jednostki tzw. modułów zadaniowych (Mission Module). Jak się jednak okazuje, ponad dziesięć lat po wprowadzeniu do linii pierwszego okrętu LCS wyposażenie docelowe tych jednostek nie jest jeszcze gotowe i co gorsza – do końca nie wiadomo, jak ono powinno wyglądać.
Informacja o zakończeniu kolejnego etapu testów modułu przeciwminowego MCM MP (mine countermeasures mission package) nie powinna więc być rozpatrywana jako sukces, ale bardziej jako próba zakamuflowania rzeczywistych problemów z realizacją całego programu. Przeprowadzone ostatnio badania obejmowały bowiem tylko dwa z kilku elementów modułu MCM MP: bezzałogowy, autonomiczny pojazd podwodny Knifefish (opracowany przez koncern General Dynamics) oraz nawodny, bezzałogowy system trałowy UISS (Unmanned Influence Sweep System).
Dodatkowo, jak wynika z komunikatu, nie testowano możliwości bojowych tych rozwiązań, a jedynie sprawdzano działanie kanału łączności pomiędzy okrętem-matką i systemami bezzałogowymi, jak również wielokrotnie powtarzano operację opuszczania i podnoszenia dronów z wody.
Nie badano więc kompletnego wyposażenia modułu MCM MP, do którego poza UISS i Kniefefish wchodzą jeszcze np. platformy lotnicze: bezzałogowy śmigłowiec MQ-8B Fire Scout i załogowy helikopter MH-60S. Oba te pionowzloty były już sprowadzane wcześniej przy współdziałaniu z trzykadłubowymi okrętami do działań przybrzeżnych LCS typu Independence i są zamawiane oddzielnymi kontraktami, ale nie jako kompleks MCM MP.
Amerykanie słusznie założyli, że statki powietrzne są ważnym elementem okrętowego modułu przeciwminowego dając możliwość szybkiego przeniesienia systemów wykrywania i niszczenia min do rejonów oddalonych od okrętu. Dodatkowo mogą być one również wyposażone w system rozpoznania brzegowego (Coastal Battlefield Reconnaissance and Analysis) pozwalający na wykrywanie min lądowych na plażach w celu wsparcia amfibijnej operacji desantowej.
Duża ilość różnych komunikatów dotyczących modułu MCM MP dowodzi, że sposób prowadzenia prób wszystkich systemów wchodzących w jego skład jest skomplikowany i trudny do zrozumienia. Informacja o zakończeniu kolejnego etapu badań nic więc tak naprawdę nie wnosi, ponieważ nie wynika z niej, co jeszcze pozostało do zrobienie oraz ile to będzie kosztowało i trwało. Takich zadań do zrobienia musi być jeszcze bardzo dużo, jeżeli się weźmie pod uwagę zapowiedź, że formalne badania operacyjne modułu MCM MP zaczną się dopiero w 2021 roku.
Wygląda to tak, jakby program LCS był miejscem, gdzie Amerykanie testują niekiedy bardzo ryzykowne pomysły i w którym przez długi czas nie udało się dojść do porozumienia, co do jednolitej koncepcji prowadzenia działań przeciwminowych okrętami do działań przybrzeżnych. Przykładowo, system UISS został zademonstrowano już w 2011 r. Informowano wtedy, że amerykańska marynarka wojenna zamierza kupić aż 52 takie systemy dla 24 modułów zadaniowych MCM MP (po dwa na moduł) oraz sześć jako zapas i do szkolenia. Ostatecznie skończyło się tylko na planach.
Okazuje się jednak, że problem jest o wiele większy. Założeniem programu LCS było bowiem opracowanie nie jednego, a trzech głównych kompletów zadaniowego wyposażenia dla okrętów LCS. Do koordynacji tych prac powołano nawet specjalne biuro (LCS Mission Modules Program Office - PMS 420). Co więcej, badania w tej dziedzinie zaczęto równolegle z projektowaniem okrętów LCS, a prototypy urządzeń gotowych już kilkanaście lat temu testowano z wykorzystaniem innych jednostek U.S. Navy, takich jak Sea Fighter i High-Speed Vessel Swift (HSV-1). Jak się okazało, duża część z badanych wtedy rozwiązań nie przeszła do dalszej części programu LCS.
Te trzy docelowe moduły MP miały zapewnić okrętom do działań przybrzeżnych możliwość:
- MCM MP - wykonywania zadań przeciwminowych (Mine Countermeasures) – planowano 24 moduły;
- ASW MP –zwalczania okrętów podwodnych (Anti-submarine Warfare) – planowano 16 modułów;
- SUW MP – działań nawodnych i powierzchniowych (Surface Warfare - SUW) – planowano 24 moduły.
Założono przy tym, że moduły MCM i SUV będą gotowe operacyjnie w 2014 roku, a ASW dwa lata później. Oznacza to, że już w tej chwili Amerykanie mają opóźnienie co najmniej siedmioletnie.
W większości przypadków założono oparcie się o bezzałogowe systemy: powietrzne UAV (Unmanned aerial vehicles), nawodne USV (unmanned surface vehicles) i podwodne UUV (unmanned underwater vehicles). Dodatkowo zadecydowano, że dla potrzeb modułów będzie wykorzystywany ten sam system opuszczania i podnoszenia dronów z wody oraz tak samo zbudowane kołyski transportujące i przechowujące pojazdy na pokładzie okrętu.
Moduł przeciwminowy MCM MP – standard dla okrętów „Czapla”?
Szczególnie interesujący jest moduł przeciwminowy (opracowywany pod kierownictwem specjalnego biura PMS 495 - Mine Warfare Program Office), ponieważ pokazuje zupełnie nowe podejście do problemu wykrywania min. Pojawiło się ono w krajach zachodnich pod koniec XX wieku i pokrywa się z ideą, jaką chciano zastosować na polskich okrętach patrolowych w ramach programu „Czapla”. Zgodnie z nią zakładano odejście od specjalistycznych okrętów przeciwminowych na rzecz przenośnych systemów, które można by było montować na jednostkach pływających dowolnej klasy lub kierować nimi z instalacji brzegowych.

Amerykanie swoje prace nad MCM MP chcieli zakończyć w 2014 r., ale wszystko wskazuje na to, że gotowy już kompleks przeciwminowy nie będzie operacyjny wcześniej niż w 2022 roku. To opóźnienie istnieje, pomimo że w programie LCS chciano korzystać z prac w ramach innyc, realizowanych równolegle programów, takich jak:
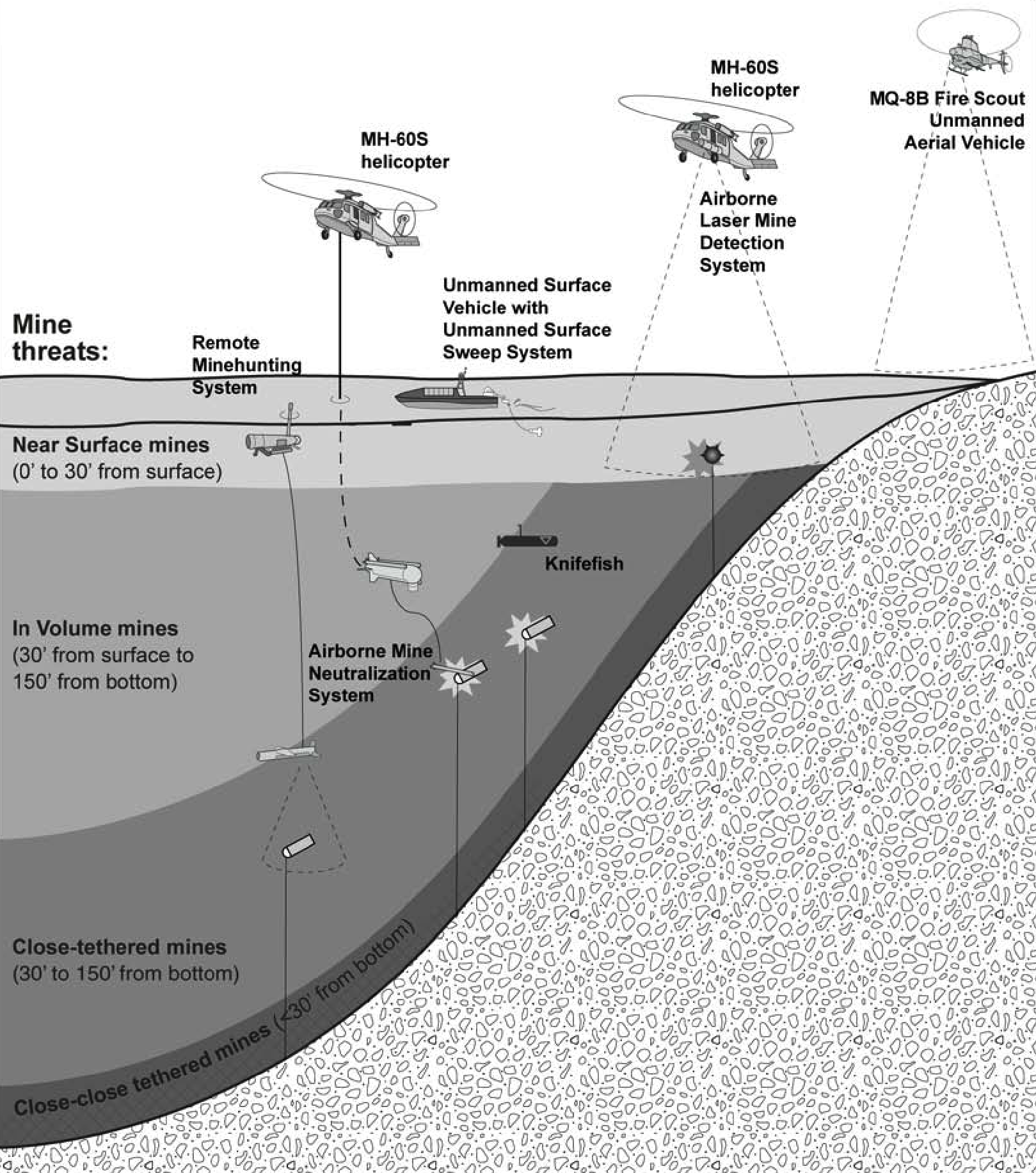
- program wpółzanurzalnego pojazdu przeciwminowego Lockheed Martin RMS AN/WLD-1 (Remote Minehunting System);
- lotniczego sonaru holowanego Raytheon AN/AQS-20A;
- lotniczego, laserowego systemu wykrywania min ALMDS Northrop Grumman’s AN/AES-1 (Airborne Laser Mine Detection System);
- lotniczego systemu szybkiego niszczenia min przy powierzchni za pomocą pocisków superkawitacyjnych RAMICS (Rapie Airborne Mine Clearance System);
- lotniczego trału niekontaktowego AMNS (Airborne Mine Neutralization System).
W 2014 określono wstępnie, że koszt jednego modułu MCM MP może przekroczyć nawet 97 milionów dolarów. Dostawa 24 kompletów mogłoby więc kosztować US Navy nawet 2,5 miliarda dolarów. Być może to właśnie te zwiększające się koszty spowodowały, że przyjęcie systemu na uzbrojenie jest odsuwane z roku na rok. Jak na razie znany jest więc tylko sposób, w jaki będzie działał system MCM MP.

W przypadku nie lotniczych systemów przeciwminowych założono od razu, że okręt LCS nie będzie wchodził samodzielnie w rejon zagrożony, a jedynie wysyłał do niego autonomiczne lub zdalnie sterowane systemy bezzałogowe. Systemy autonomiczne UUV mają działać pod wodą i być wykorzystywane głównie do prowadzenia rozpoznania obiektów minopodobnych. Systemy zdalnie sterowane będą miały dodatkowo możliwość identyfikacji i niszczenia min, a ich bazą są z założenia bezzałogowe pojazdy nawodne USV.
Prace nad takimi pojazdami toczyły się w Stanach Zjednoczonych od dawna, m.in. w ramach rozpoczętego w styczniu 2002 roku programu Spartan Scout. Był on realizowany przez koncerny Northrop Grumman i Raytheon, które opracowały różnego rodzaju moduły misyjne przygotowane do montowania na zdalnie sterowanych siedmio- i jedenastometrowych sztywnodennych łodziach motorowych RHIB (Rigid-hull inflatable boat). Założenia były więc takie same, jak później w programie LCS. Łodzie motorowe miały więc bazowe, stałe wyposażenie (system zdalnego sterowania, system nawigacyjny i antykolizyjny oraz system przekazywania danych), a dzięki dokładanym urządzeniom miały mieć możliwość: wykonywania zadań przeciwminowych, zwalczania okrętów podwodnych, wykonywania precyzyjnych uderzeń na cele nawodne i lądowe, chronienia sił własnych i realizowania misji rozpoznawczych.
Dzięki specjalnie zaprojektowanym systemom podnoszenia i opuszczania do wody przygotowywano się do wykorzystania na łodziach Spartan Scout m.in. zmodyfikowanego trału Mk 104, sonaru AN/AQS-24, holowanego sonaru obserwacji boczny AQS-14/20, sonoboi oraz sonaru ZOP typu Flash. Zakładano też dołożenie uzbrojenia w postaci torped ZOP typu Mk 54 lub LHT, wielolufowego karabinu maszynowego systemu Gatling 7,62 mm GAU-17A i rakiet kierowanych np. typu Hellfire.
Ostatnie komunikaty wskazują, że budową dronów nawodnych zajmuje się już nie Northrop Grumman, ale koncern Texatron. O ile jednak sama platforma bazowa została zmieniona, to Amerykanie prawdopodobnie wykorzystali wcześniejsze prace nad modułami misyjnymi dronów Spartan Scout oraz ich stałym wyposażeniem

W przypadku pojazdu bazowego Texatronu CUSV (Common Unmanned Surface Vehicle) do takiego stałego wyposażenia zalicza się przede wszystkim układ napędowy (dwa silniki diesla 540 HP Cummins QSC8.3L) z dodatkowym generatorem, sprzęt radiowy, sprzęt zabezpieczający bezpieczne pływanie (radar, głowica optoelektroniczna, oświetlenie nawigacyjne, sygnalizator świetlny i dźwiękowy, głośnik, GPS), interfejsy do modułów zadaniowych, system dowodzenia i kontroli oraz układ opuszczania i podnoszenia systemów podwodnych. Zapas paliwa wystarcza na wykonywanie misji o długości ponad 5,5 godzin.
Pojazd CUSV może prowadzić wykrywanie min holując za sobą sonar obserwacji bocznej. W tym przypadku dane o sytuacji podwodnej są cały czas przekazywane w czasie rzeczywistym na okręt – matkę. Wykrywaniem min zajmuje się również drugi system testowany obecnie przez Amerykanów – oparty o autonomiczny bezzałogowy pojazd podwodny Knifefish. Jest on przygotowany do realizowania wielogodzinnej misji poszukiwawczej i przekazywania danych na okręt okresowo (przerywając misję i wynurzając się na powierzchnię) lub po zakończeniu zadania i wyjęciu go z wody na okręt.
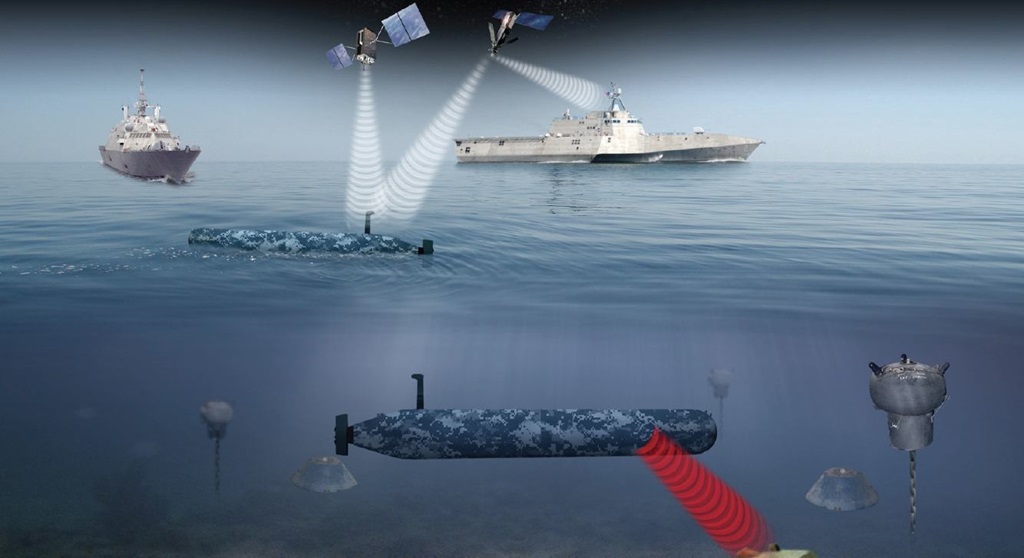
Sam pojazd jest zbudowane na bazie cywilnego drona podwodnego Bluefin-21 zaprojektowanego przez amerykańską firmę Bluefin Robotics. Zbudowano w ten sposób robota podwodnego w kształcie torpedy o długości 5,8 m, średnicy 0,53 m i wadze 770 kg. Jego akumulatory litowo-jonowe zapewniają działanie pod wodą przez ponad 16 godzin po zaplanowanej trasie. Na pokładzie drona Knifefish zainstalowano sonar z syntetyczną aperturą pozwalający na wykrywanie różnego rodzaju min (w tym min zakopanych w piasku). Za pomocą tego drona nie można jednak niszczyć wykrytych obiektów podwodnych

Taką możliwość ma natomiast bezzałogowy pojazd nawodny CUSV. Może on bowiem holować trały akustyczne i magnetyczne generujące pola fizyczne wzbudzające zapalniki min dennych - powodując ich wybuch. Istnieje również możliwość punktowego niszczenia wykrytych i rozpoznanych obiektów podwodnych za pomocą jednorazowych, samobieżnych pojazdów podwodnych Sea Fox.




























