











- ANALIZA
- WAŻNE
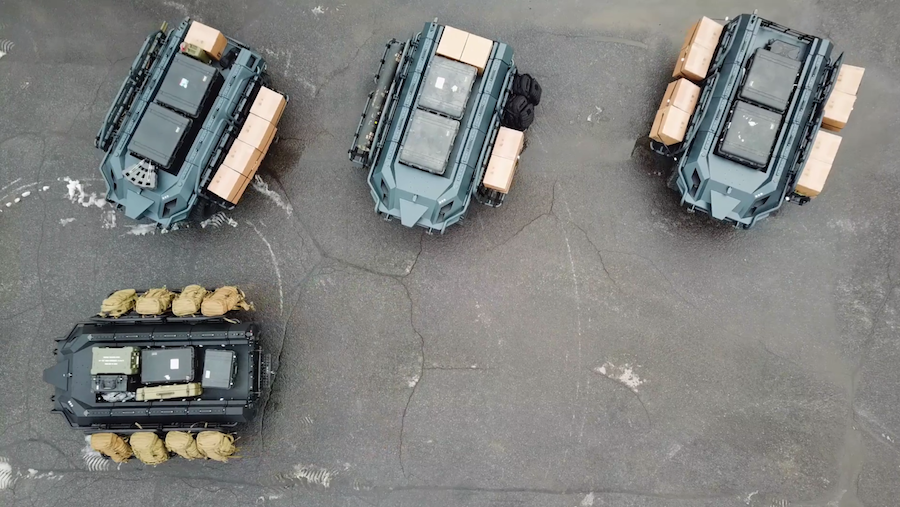
Roboty Rheinmetall Mission Master [ANALIZA]

Niemiecki koncern Rheinmetall, a konkretnie jego spółka Rheinmetall Canada już od kilku lat intensywnie rozwija swoją autorską rodzinę bezzałogowych pojazdów lądowych Mission Master. Kolejne wersje specjalistyczne tych kołowych robotów spotkały się z dużym zainteresowaniem na świecie, a ich rozwój jest cały czas kontynuowany.
Roboty lądowe już niedługo mogą stać się jednym z zasadniczych elementów ugrupowań taktycznych współczesnych armii. O ich stale rosnącym znaczeniu decydują nie tylko niskie koszty eksploatacji czy duża wszechstronność wykorzystania, ale również ciągle odkrywane nowe zdolności, które zmienią taktyczno-operacyjne oblicze prowadzenia walki. Ponadto robot może wykonać zadanie w sytuacji, gdy człowiek w wysokim stopniu musiałby narażać swoje zdrowie i życie.
Wbrew opinii wielu sceptyków robot (ciągle ulepszany) może już wkrótce stać się jednym z głównych systemów uzbrojenia, ściśle współpracującym z piechotą na polu walki. Najpierw jej towarzysząc, niosąc sprzęt i wyposażenie, prowadząc rozpoznanie i dozorowanie. Pojawiły się też pierwsze maszyny uzbrojone i koncepcje wykorzystania kilku/kilkudziesięcioleciu maszyn lądowych i powietrznych w prowadzeniu skutecznej manewrowej obrony przeciwpancernej czy przeciwlotniczej. A to przecież dopiero początek możliwych zastosowań.
Niemiecki koncern Rheinmetall przez cały okres swojej działalności związanej z projektowaniem i produkcją sprzętu przeznaczonego dla wojska był i pozostaje nadal jednym ze światowych liderów w dziedzinie implementacji najnowszych technologii w tym obszarze. Zdaje sobie bowiem sprawę, że by silnie istnieć na specyficznym rynku produktów militarnych musi posiadać w swojej ofercie zarówno klasyczne rozwiązania z „najwyższej półki” jak również propozycje kolejnej generacji broni. Dlatego dość szybko rozpoczęto w nim prace nad bojowym zastosowaniem laserów na różnych platformach czy właśnie wykorzystaniem robotów lądowych.
W tym ostatnim przypadku koncepcja inżynierów Rheinmetall Canada zakładała stworzenie towarzyszących piechocie, modułowych konstrukcji Mission Master SP oraz Mission Master XT. Obie cechuje wysoka mobilność taktyczno-operacyjna, duża ładowność, możliwość łatwego dostosowania do profilu danej misji, ciche działanie w dowolnym środowisku pracy oraz niskie koszty eksploatacji.

Roboty do każdego zadania
Tworzące rodzinę Mission Master obie bazowe platformy zaprojektowano tak, by w dość łatwy sposób dostosować je do wykonywania specyficznych misji w różnym terenie i środowisku operacyjnym. Wyposażono je w wymienne moduły zadaniowe, które są wstępnie skonfigurowane na stabilnej płycie a przez to gotowe do zamontowania na platformie bazowej w ciągu kilku minut. Sprawia to, że roboty te są w stanie wykonywać wiele rodzajów misji, jak np. tych związanych z transportem logistycznym czy bezpośrednio wyposażenia piechoty, prowadzeniem rozpoznania i nadzoru, ochroną granic, udzielaniem wsparcia ogniowego walczącym żołnierzom, wykonywaniem ewakuacji medycznej, detekcji użycia broni ABC czy pełnieniem roli przekaźników komunikacyjnych.
Ponadto każdy robot wchodzący w skład tej rodziny niezależnie od charakteru misji jaką w danej chwili wykonuje, może współpracować z innymi maszynami oraz wymieniać z nimi dane, zwiększające tym samym efektywność realizowanych zadań. Dzięki zestawowi autonomicznemu Rheinmetall PATH (A-kit) roboty są zdolne do wykonywania autonomicznej jazdy z wykorzystaniem sztucznej inteligencji i pozycjonowania różnymi metodami oraz mogą współpracować z innymi systemami uzbrojenia czy dowodzenia i przekazywania danych.
Rheinmetall Mission Master SP
Ten kompaktowy robot w układzie 8x8 zaprojektowano by towarzyszył żołnierzom w szeregu wybranych rodzajów misji. Szczególnym ich przykładem są te, które charakteryzują się wysokim ryzyka dla wykonujących je ludzi . Jego wymiary podstawowe i masa (długość - 2950 mm, szerokość – 1550 mm, prześwit - 240 mm i masa 1100 kg) pozwalają zwinnie poruszać się autonomicznie z maksymalną prędkością ponad 30 km/h pomiędzy krzakami, drzewami czy budynkami. Może on być holowany za pojazdami wojskowymi (z prędkością do 60 km/h), transportowany drogą powietrzną lub desantowany z wykorzystaniem spadochronów ze śmigłowców czy samolotów transportowych (m.in. z CH-53, C-130 Hercules lub CH-47 Chinook).
Napęd w postaci silnika elektrycznego zasilanego z baterii litowo-jonowych zapewnia mu niską sygnaturę cieplną i akustyczną a przy tym i wysoką mobilność. Pojemność użytych baterii pozwal na 8 godzin nieprzerwanej pracy takiego robota. W wypadku pokonywania przeszkody wodnej pływaniem maksymalna ładowność wynosi do 300 kg, a prędkość poruszania się w wodzie do 5 km/h.
W ramach zastosowanego systemu wymiany danych uzyskano zgodność ze standardami NATO wg STANAG 2433 i raportowania wg STANAG 3377. Zdjęcia są wykonywane i gromadzone zgodnie ze standardami STANAG 4559 CSD oraz STANAG 4545. W zakresie interoperacyjności bezzałogowego systemu sterowania oraz kontroli i monitorowania czujników wykrywania broni CBRN przyjęto rozwiązania zgodne ze STANAG 4586. Standard wskazywania celów to STANAG 4607, wideo jest transmitowane zgodnie ze STANAG 4609. Robot jest też zgodny z normą US MIL-STD-6017 (VMF).
Zasadnicze zadania jakie może wykonywać to prowadzenie obserwacji, transport wyposażenia osobistego i uzbrojenia żołnierzy (maksymalna ładowność 600 kg), ładowanie baterii zasilających ich sprzęt elektroniczny i optoelektroniczny. Opcjonalnie by poprawić dzielność terenową w głębokim śniegu lub błocie można go wyposażyć w gąsienice oraz wyciągarkę. Ponadto również w napęd hybrydowy (diesel/elektryczny), generatory zewnętrzne czy osłony balistyczne zapewniające poziom ochrony I wg STANAG 4596.
Mission Master SP – Cargo to podstawowa wersja przeznaczona do transportu różnych ładunków. Mission Master SP – Fire Support z kolei może zostać uzbrojony w 7.62 mm km lub 12.7 mm wkm czy 40 mm granatnik automatyczny umieszczone w ZSMU. Inne proponowane uzbrojenie to wyrzutnie pocisków rakietowych lub np. uderzeniowych BSP. Mission Master był prezentowany między innymi z wyrzutniami polskiej amunicji krążącej wystrzeliwanej z wyrzutni Warmate TL, a także z wyrzutniami rakiet 70 mm oraz granatnikami przeciwpancernymi Panzerfaust 3. Tak jak w wypadku wszystkich operacji systemów Mission Master, cele nie są nigdy rażone w sposób automatyczny, bo decyzje o oddziaływaniu kinetycznym każdorazowo podejmuje człowiek (man-in-the-loop).

Mission Master Rescue jest m.in. zdolny do wsparcia prowadzenia rozpoznania medycznego obszaru, gdzie wykonuje misję, dokonywania interwencji medycznej oraz ewakuacji rannych z pola walki. Przenosi on całe niezbędne wyposażenie medyczne i sprzęt przeznaczony do prowadzenia ewakuacji rannych, w tym parę noszy koszowych, maski tlenowe i defibrylator. Dlatego jest w stanie zastąpić kilku żołnierzy personelu medycznego jednocześnie. W skrajnych przypadkach medycy lub lekarze mogą go wykorzystać jako platformę do przeprowadzenia zabiegów ratujących ludzkie życie.
Mission Master-Surveillance został z kolei wyposażony w głowice optoelektroniczne z kamerami TV i termowizyjnymi dalekiego zasięgu, radiolokator i dalmierz laserowy. To wszystko zainstalowano na rozsuwanym teleskopowo maszcie. Możliwe jest też zastosowanie dronów powietrznych, zarówno działających na uwięzi jak iswobodnie latających.
Bezzałogowiec był już testowany przez żołnierzy z kilku krajów, między innymi USA, Niemiec i Hiszpanii) w trakcie trwania różnych ćwiczeń wojskowych. Na zakup dwóch partii robotów zdecydowała się Wielka Brytania, która będzie badać ich zastosowanie w pododdziałach lekkiej piechoty. Cztery z nich zamówiono w 2020 roku w wersji transportowej, a kolejne cztery w lutym 2020 roku w wersji wsparcia ogniowego, uzbrojone w karabiny maszynowe 7,62 mm. Na pozyskanie partii robotów Mission Master, również w celu badań w 13. Brygadzie Aeromobilnej zdecydowała się Holandia. Z kolei Australia rozpoczęła w 2020 roku we współpracy z Rheinmetall program partnerstwa, który ma zaowocować opracowaniem rodziny robotów na platformie Mission Master.
Rheinmetall Mission Master XT
To większy robot w układzie 4x4, zdolny do przewozu cięższych ładunków o masie do 1000 kg. Specjalnie zaprojektowany układ jezdny zapewnia mu wysoką mobilność terenową oraz taktyczno-operacyjną. Zastosowanie systemu CTIS pozwala na dostosowanie ciśnienia w oponach do panujących warunków terenowych (możliwa jest dalsza jazda nawet z dziurami o średnicy cala w oponach). Wbudowany układ sterowania pozwala w sytuacjach nadzwyczajnych prowadzić robota przez jednego z żołnierzy pododdziału a kluczowe układy maszyny zostały osłonięte opancerzeniem. W opcji jest możliwość dopancerzenia tej konstrukcji do poziomu odpowiadającego II wg STANAG 4569.

Robot ma 3720 mm długości, 2570 mm szerokości, 500 mm prześwitu i masę 2217 kg. Jego maksymalna prędkość to 40 km/h i przez okres do 6 godzin może być używany do misji „cichej warty”. Napęd zasadniczy zapewnia silnik wysokoprężny sprzężony z przekładnią hydrostatyczną. Za dostarczanie energii elektrycznej odpowiadają baterie litowo-jonowe. Pojazd opancerzony lub ciężarówka może holować Mission Mastera XT z prędkością do 5 km/h.
Robot ma wiele zastosowań, może być używany do misji bojowych, jak i transportowych/wsparcia. Na targach DSEI 2021, na których został zademonstrowany po raz pierwszy, pokazano go z wyrzutniami ciężkich przeciwpancernych pocisków kierowanych Brimstone. Robot może więc pełnić nawet funkcję niszczyciela czołgów.
Zabudowany system wymiany danych ma tożsame zgodności ze standardami NATO jak w Mission Master SP. Również może on podobnie jak „mniejszy brat” być transportowany różnymi metodami w tym desantowany za pomocą spadochronu a pokonuje przeszkody wodne pływaniem z prędkością do 5 km/h. Ten robot może już zabrać uzbrojenie i sprzęt przeznaczone dla całego plutonu i jest zdolny do przejechania 750 km bez tankowania.

Definicja autonomii według Rheinmetalla
Zestaw autonomiczny Rheinmetall PATH stanowi zasadniczy rdzeń rodziny Mission Master, zapewniając tym robotom zdolność do działania w różnych warunkach wykonywania misji. Oferuje szeroką gamę trybów sterowania i może z powodzeniem działać na każdej innej platformie systemu drive-by-wire.
Zastosowana technologia sztucznej inteligencji pozwala na zachowanie różnych poziomów autonomii oraz pozycjonowania. W tym rozpoznawania i klasyfikacji obrazu, sprzęgania zastosowanych czujników i powiązania gromadzonych przez nie danych, jednoczesną lokalizację i mapowanie (SLAM), wykrywanie i unikanie przeszkód, klasyfikację i śledzenie celów, mapowanie środowiska i analizę terenu, generowanie trajektorii i wykonywanie tras, planowanie misji i przydzielanie zadań oraz zapewnienie hierarchicznej kontroli dokonywanej przez wielu operatorów.
Jednak to od człowieka w tej rozbudowanej pętli zadaniowej zależy czy dana operacja będzie wykonywana czy nie. To operator wskazuje miejsce, do którego robot lub grupa robotów w ustalonym porządku ma podążać. Samo pokonanie trasy może odbywać się po zadanej trajektorii lub autonomicznie. W tym drugim przypadku robot samodzielnie decyduje o wyborze najbardziej dla niego efektywnej drogi marszu. Operator może też wstępnie zaprogramować różne sekwencje trybów nawigacji w określonej kolejności.
Bezpieczeństwo użytkowania zestawu PATH odpowiada normą MIL-STD-882 i DEF-STAN 00-56 a każda kontrola trybu pracy zawiera wiele warstw ochronnych. PATH zapewnia łatwy w użyciu interfejs sterowania a scentralizowane menu zawiera informacje o kilku statusach każdego robota i pozwala operatorom na wykorzystanie każdego z nich w czasie rzeczywistym.

Otwarta architektura zestawu pozwala również na jego ciągły rozwój w zależności od wymagań przyszłych użytkowników lub wprowadzania nowych innowacji. PATH ma zastosowanie nie tylko w wypadku robotów, ale też w aplikacjach C2 czy systemach żołnierza przyszłości. Dzisiaj poprzez ten zestaw roboty Mission Master są połączone poprzez sieć wymiany danych z systemami dla żołnierzy oraz zarządzania polem walki (BMS) oferowanym przez koncern Rheinmetall. Ale można go również sprzęgnąć z podobnymi rozwiązaniami oferowanymi przez innych wykonawców, takich jak ATAK.
Rodzina Mission Master może również działać w koncepcji tzw. „wilczego stada”, gdzie operatorzy koncentrują się na głównych zadaniach przydzielonych im do realizacji natomiast PATH samodzielnie nadzoruje działania poszczególnych robotów związane z przygotowaniem się i wejściem do akcji. Kontrola kilku robotów dokonywana jest za pomocą sieci LTE/5G/SATCOM. Ponadto w wypadku działania wozów załogowych i robotów te drugie powodują znaczne rozszerzenie świadomości sytuacyjnej tych pierwszych.
Podsumowanie
Rodzina robotów Mission Master to już dopracowana i przemyślana koncepcja, która nadal podlega rozwojowi. Wchodzące w jej skład maszyny mogą już wykonywać wiele zadań a dzięki modułowej konstrukcji i przede wszystkim zestawowi PATH w przyszłości ten zakres znacznie się rozszerzy. Sam PATH może być wykorzystany nie tylko w robotach, ale i systemach dowodzenia, przekazywania danych czy kierowania ogniem. Zaimplementowanie w nim sztucznej inteligencji skokowo rozszerza jego możliwości.
Artykuł przygotowany we współpracy z Rheinmetall




























