











- ANALIZA
- WAŻNE
Postęp w dziedzinie robotyzacji współczesnego pola walki w 2020r.
Dobiegający końca 2020r. przyniósł szereg zmian, w tym dotyczących szeroko pojętej obronności i bezpieczeństwa. Jednym z jej aspektów jest ciągły postęp technologii związanych z rozwojem i wykorzystaniem wszelkiego rodzaju platform bezzałogowych do zastosowań militarnych na współczesnym i przyszłym polu walki. Niniejszy artykuł ma na celu przedstawienie Czytelnikowi wybranych wysiłków w tej dziedzinie jakie miały miejsce w tym roku, a także wskazanie prawdopodobnych trendów jakich świadkami będziemy w przyszłości.
Roboty, rozumiane jako bezzałogowe platformy sterowane zdalnie przez człowieka lub posiadające pewną autonomię funkcjonowania i realizacji czynności (np. dzięki zaawansowanemu oprogramowaniu i procesorom, siłownikom, napędom, źródłom energii etc.) stały się jednym ze środków walki sił zbrojnych większości państw świata. W ostatnim roku można było zaobserwować znaczny postęp w pracach nad nimi, a także przykłady ich użycia w konfliktach zbrojnych. W celu ich omówienia autor posłuży się kryterium środowiska ich wykorzystania jakim są: ląd, powietrze, woda. Z uwagi na potrzebę ograniczenia wielkości opracowania pominięto w artykule przestrzeń kosmiczną.
- Lądowe platformy bezzałogowe.
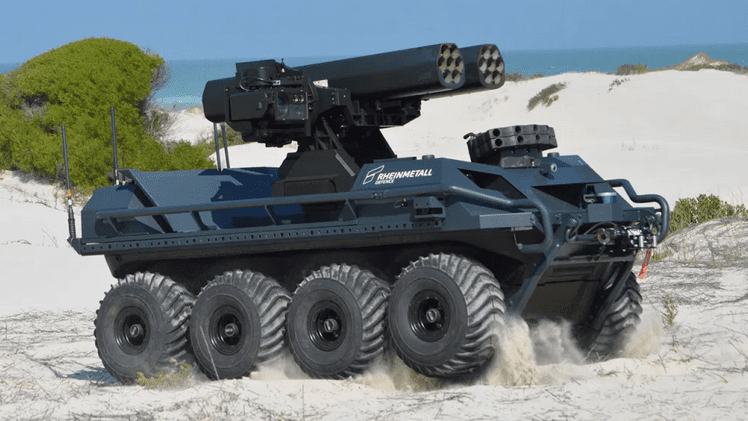
W 2020r. zauważalny był postęp w budowie bezzałogowych pojazdów lądowych o coraz większej autonomii działania. Przykładem takiego rozwiązania jest polski „Hunter” przeznaczony do prowadzenia działań rozpoznawczych i patrolowych, a opracowany przez Przemysłowy Instytut Automatyki i Pomiarów (PIAP). Pojazd ten dzięki połączeniu komputera o dużej mocy obliczeniowej, czujników oraz odbiornika GPS, a także znacznej dzielności terenowej cechuje się dużą samodzielnością w poruszaniu się, w tym automatycznego omijania przeszkód oraz umiejętnością wyznaczania sobie trasy marszu. W przyszłości po sprzęgnięciu go z kolejnymi sensorami cechy te umożliwiają wykorzystanie go zarówno jako autonomicznego robota rozpoznawczego czy patrolowego, ale także jako pojazdu samodzielnie dostarczającego zaopatrzenie (w tym w ramach bezzałogowych konwojów) bądź transportującego wyposażenie żołnierzy (np. plecaki, broń zespołową, amunicję). Podobne rozwiązanie jest już obecnie testowane m.in. przez siły zbrojne W. Brytanii, które zakupiły niewielką partię kołowych robotów Mission Master w wersji transportowej (cargo) produkowanych przez niemiecką firmę Rheinmetall. W tym przypadku zakup podyktowany był pracami badawczymi w ramach programu „Robotic Platoon Vehicle” mającego na celu określenie stopnia, w jakim bezzałogowe pojazdy mogą zwiększyć skuteczność i możliwości spieszonego plutonu piechoty. Podobną drogą podążają siły zbrojne Niderlandów, które nabyły ww. niemieckie roboty w celu przeprowadzenia badań do sformułowania założeń i koncepcji Future Manoeuvre Elements mającej docelowo zwiększyć efektywność prowadzenia działań. W tym celu utworzono nawet osobny pododdział RAS[1] wchodzący w skład 13 Brygady Lekkiej, w ramach którego będą prowadzone badania i testy.


Innym wartym analizy kierunkiem prowadzenia prac w 2020r. są eksperymenty nad wykorzystaniem formacji mieszanych złożonych z pojazdów załogowych i bezzałogowych w prowadzeniu symulowanych działań bojowych. Badania takie prowadzą m.in. Amerykanie w ramach programu „Robotic Combat Vehicle” (RCV) mającego umożliwić wypracowanie wniosków dotyczących rozwoju technologicznego nowych platform bezzałogowych w przyszłości, a także wypracowania stosownej taktyki działania ww. mieszanej formacji. W ramach eksperymentu w lipcu i na początku sierpnia amerykańscy żołnierze wykonywali klasyczne dla pododdziałów zmechanizowanych zadania bojowe (tj. natarcie, obrona, działania opóźniające, marsze). Do badań wykorzystano pluton zmechanizowany złożony z dwóch załogowych bojowych wozów piechoty M2 „Bradley” pełniących rolę wozów dowodzenia i kierowania (MET-D[2]) oraz czterech bezzałogowych transporterów opancerzonych M113. Te ostatnie nie tylko samodzielnie poruszały się w ramach ww. mieszanej formacji, lecz także wykonywały zadania ogniowe za pomocą zamontowanego na nich uzbrojenia. Amerykanie zakładają, że w niedalekiej przyszłości podobne bezzałogowe pojazdy zostaną wyposażone w zestawy podczerwieni trzeciej generacji umożliwiające kierowania działaniami pojazdów bezzałogowych o docelowym zasięgu nie mniejszym niż 14 kilometrów. Takie rozwiązanie umożliwiłoby m.in. skierowanie do przełamywania silnej obrony przeciwnika bojowych pojazdów bezzałogowych, które tym samym torowałyby drogę dla tradycyjnych oddziałów lub pododdziałów piechoty zmechanizowanej lub czołgów. W tym zresztą kierunku są prowadzone prace nad następcami bwp M2 „Bradley” oraz czołgów podstawowych M1 „Abrams”, które w przyszłości mają być opcjonalnie obsadzane przez załogi. Tym samym w przyszłości lądowe roboty bojowe przejęłyby od ludzi wykonywanie większości zadań gdzie spodziewane jest poniesienie znacznych strat.

Analizując zróżnicowane możliwości użycia bezzałogowych platform lądowych (zarówno do zadań bojowych, ale także zabezpieczających i wsparcia) nie mogą dziwić prace nad tworzeniem całych ich rodzin. Przykładowo niemiecka firma Rheinmetall opracowuje całą grupę autonomicznych kołowych pojazdów bezzałogowych wykorzystujących podwozie robota Mission Master. Na rodzinę pojazdów opartych o to rozwiązanie składać się będą platformy przeznaczone do: rozpoznania patrolowego, rozpoznania CBRN[3], wsparcia ogniowego, wystrzeliwania amunicji krążącej, ewakuacji medycznej, transportu czy retranslacji łączności radiowej. Co równie istotne dwie wersje zostały już zaprezentowane w 2020r. – wersja transportowa (wcześniej wspomniana Mission Master-cargo) oraz wersja rozpoznania patrolowego. Ta ostatnia zaprezentowana w listopadzie 2020r. jako Mission Master-Armed Reconnaissance (MM-RC) jest zdolna do przekazywania zdobytych informacji do odbiorcy w czasie rzeczywistym za pomocą dwukierunkowego systemu łączności, który może być zintegrowany z dowolną radiostacją. Do prowadzenia rozpoznania robot MM-RC jest wyposażony w moduł rozpoznawczy z radarem pola walki, systemami optoelektronicznymi, systemem kamer do obserwacji w promieniu 360º, dalmierzem laserowym i laserowym podświetlaczem celu. Dla zapewnienia lepszych warunków obserwacji wykorzystywany jest 3,5m rozkładany maszt. Do samoobrony lub wykonywania zadań ogniowych pojazd uzbrojony jest w 7,62-mm km zamontowany w zdalnie sterowanym module uzbrojenia umieszczonym w przedniej części pojazdu. Inżynierowie Rheimetall zakładają przy tym współdziałanie robotów Mission Master kilku typów w ramach jednego pododdziału. Umożliwić ma to wykorzystanie łączności pomiędzy nimi oraz zastosowanie tzw. „sztucznej inteligencji” (AI[4]). W podobnym kierunku zmierza estońska spółka Milrem Robotics, która w br. ogłosiła rozpoczęcie prac nad bezzałogowym wozem bojowym X RCV, który bazując na podwoziu gąsienicowym, będzie mógł pełnić rolę pojazdu wsparcia uzbrojonego w zależności od wersji w: armatę szybkostrzelną, karabiny maszynowe, wyrzutnie ppk, moździerze lub działka przeciwlotnicze. Estończycy przewidują też opracowanie wersji zabezpieczenia technicznego, nośnika systemów radarowych czy pojazdów transportowych.

Nieco inne podejście reprezentują USA oraz Federacja Rosyjska. Obydwa te państwa w 2020r. przedstawiły swoje koncepcje posiadania grupy bojowych pojazdów bezzałogowych opartych o różne konstrukcje (podwozia). W styczniu amerykańskie wojska lądowe (US Army) poinformowało o wyborze dwóch finałowych oferentów w programie pozyskania nowych bezzałogowych wozów bojowych - w wersji lekkiej i średniej (Robotic Combat Vehicle — Light and Medium), którzy mają zbudować prototypową partię swoich pojazdów. Zwycięzcami postępowania zostały odpowiednio spółki QinetiQ North America i Textron. Z kolei Rosjanie testują rodzinę robotów o nazwie „Kungas” w skład której wchodzą:
- zrobotyzowany gąsienicowy transporter opancerzony BTR-MDM Rakuszka-M (Obiekt 955M) o wadze 17 000 kg przeznaczony do wykonywania zarówno zadań ogniowych jak i transportu;
- robot transportowy (Возимый) o masie 2000 kg przeznaczony do przewożenia wyposażenia pododdziału, ale także służący mu jako dodatkowe źródło energii lub do prowadzenia rozpoznania (m.in. za pomocą urządzeń optoelektronicznych czy małych radiolokatorów);
- kołowy lekki (Легкий) o masie 200 kg posiadający zdolność do skrytego prowadzenia rozpoznania, ale także do wsparcia ogniowego (m.in. za pomocą poczwórnej wyrzutni ppk oraz 7,62mm km PKTM);
- przenośny (Носимый) o masie 12 kilogramów zdolny (w zależności od wersji) do: skrytego rozpoznania, rozminowania terenu, naprowadzenia robotów bojowych lub ognia prowadzonego z platform załogowych, a także transportu;
- „Nierechta” (Нерехта) występujący w wersji: bojowej (uzbrojonej m.in. w ppk, wkm „Kord” lub granatnik automatyczny), naprowadzania ognia artylerii czy transportowej.
Pomimo, że ww. roboty są przeznaczone do różnych zadań to dzięki zastosowaniu kompatybilnych systemów sterowania możliwe jest jednoczesne kierowanie ich działaniami z jednego stanowiska kierowania. W ramach prowadzonych badań sprawdzano nie tylko ich mobilność i zdolność do wykonywania stawianych im zadań, ale również odporność na impuls elektromagnetyczny powstały na skutek symulowanego wybuchu jądrowego.


Na koniec warto wspomnieć o wprowadzeniu robotów patrolowych przypominających wyglądem i sposobem poruszania się psy (stąd określanych mianem „robopsów”) do ochrony i patrolowania bazy lotniczej Thyndall na Florydzie w listopadzie br. Swoje zadania roboty będą wykonywać wspólnie z ludźmi oraz psami wartowniczymi. Dzięki zainstalowanym kamerom i czujnikom będą w stanie dotrzeć do miejsc słabiej dostępnych dla ludzi bądź pojazdów. Obraz i informacje przekazywane będą za pośrednictwem radiostacji do centrum operacyjnego, skąd otrzymywać będą też zadania. Tym samym wprowadzenie „robopsów” znacznie zwiększy tzw. świadomość sytuacyjną[5] personelu odpowiedzialnego za ochronę bazy.
- Powietrzne platformy bezzałogowe.
Mijający rok upływa niewątpliwie pod znakiem pokazu możliwości i skuteczności powietrznych bezzałogowych statków powietrznych we współczesnych konfliktach zbrojnych. Najpierw w ramach operacji „Wiosenna Tarcza” w dniach 28.02-04.03.2020 doszło do użycia tureckich bojowych bezzałogowych statków powietrznych (BBSP) „Bayraktar TB2” i „Anka-S” nad prowincją Idlib w Syrii przeciwko syryjskim siłom rządowym. Zastosowanie ww. BBSP jako środków rozpoznawczo-uderzeniowych wykorzystujących amunicję precyzyjną w połączeniu z wykorzystaniem systemów walki radioelektronicznej (WRE) „Koral” pozwoliło na skuteczne porażenie dość nowoczesnych systemów przeciwlotniczych bliskiego i krótkiego zasięgu (m.in. Pancyr-S1, BUK) oraz zgrupowań wojsk pancernych i zmechanizowanych rządu syryjskiego. Następnie te same typy BBSP w połączeniu z ww. systemem WRE zostały użyte w podobny sposób w Zachodniej Libii do wsparcia sił Rządu Porozumienia Narodowego (GNA) z Trypolisu przeciwko Libijskiej Armii Narodowej (LNA) w ramach operacji „Wulkan Gniewu” w maju i czerwcu 2020. Efekt ich użycia był podobny – zadanie znacznych strat stronie przeciwnej przy akceptowalnym poziomie strat wśród własnych BBSP. Niejako zwieńczeniem użycia BBSP była tzw. II wojna w Górskim Karabachu (23.09-09.11.2020), podczas którego siły zbrojne Azerbejdżanu w ramach operacji połączonej wykorzystały kombinację uderzeń BBSP „Bayraktar TB2”, amunicji krążącej (a więc tzw. dronów-kamikaze, w tym przypadku „Harop”, „Skystriker” i „Orbiter-1K”), ppk dalekiego zasięgu (m.in. ppk „Spike” w wersji ER i NLOS) oraz artylerii (lufowej i rakietowej) do zadania wysokich strat broniącym się wojskom Górskiego Karabachu oraz wspierających ich siłom zbrojnych Armenii. To co jest charakterystyczne dla wszystkich ww. przykładów użycia bezzałogowych platform powietrznych to realizacja zadań dotychczas przypisanych dotychczas dla lotnictwa taktycznego oraz lotnictwa wojsk lądowych (m.in. wsparcie bezpośrednie, izolacja pola walki, niszczenie systemów obrony przeciwlotniczej i powietrznej, uderzenia na składy logistyczne na zapleczu, rozpoznanie na całą głębokość ugrupowania przeciwnika). Ich umiejętne użycie pozwoliło na odniesienie sukcesów na poziomie operacyjnym, a także ujawniło aspekt silnego oddziaływania psychologicznego na żołnierzy strony przeciwnej. Udowodniły także, że przed „latającymi robotami” wyposażonymi w nowoczesne głowice optoelektroniczne nie chronią już ani tradycyjne siatki maskujące, ani okopy zmuszając tym samym do poszukiwania nowych sposobów maskowania i ochrony wojsk na współczesnym polu walki. Działania związane z użyciem BSP i BBSP doprowadziły także do rozwoju taktyki ich użycia, w tym opracowania metod ataków z jednoczesnym wykorzystaniem BSP/BBSP i amunicji krążącej na nowoczesne zestawy przeciwlotnicze.

Odnoszone sukcesy oraz zalety BSP przyczyniły się także do coraz większego ich udziału w systemach monitorowania granicy państwowej oraz wód terytorialnych. Przykładem mogą tu być zarówno Turcja jak i Ukraina, które za pomocą BSP zamierzają wkrótce stworzyć takie stałe strefy kontroli wzdłuż własnych granic.
Kolejnym zauważalnym kierunkiem rozwoju „latających robotów” jest postęp
w opracowywaniu nowych konstrukcji przeznaczonych dla najniższych szczebli: pojedynczych żołnierzy, załóg wozów bojowych czy nieco większych platform. Przykładem tego jest zaprezentowana w br. rodzina małych BSP „Ninox” opracowana przez izraelską spółkę SpearUAV. Oferowane przez nią BSP/BBSP mogą być wystrzeliwane ze specjalnych zasobników, granatników lub wyrzutni, a także startować „z ręki”. Obecnie producent oferuje: BSP Ninox 40 klasy mikro do użycia do rozpoznania przez pojedynczego żołnierza, Ninox 66 zawierające szereg BBSP z głowicami o masie do 700g ładunku do wystrzeliwania z czołgów, BWP czy innych platform lądowych (a więc amunicji krążącej, zdolnej do tego działania
w tzw. roju) oraz Ninox 103 – większy (klasy mini) z głowicą do 1,5kg ładunku wybuchowego do przenoszenia przez platformy powietrzne, morskie i lądowe. W tym kierunku wydaje się nieśmiało podążać Wojsko Polskie, którego Inspektorat Uzbrojenia podpisał w br. umowę z Asseco Poland na dostawę w 2021r. 6 zestawów BSP klasy mikro (każdy z 4 BSP, stacją kontroli i kierowania z zespołem nadawczo-odbiorczym obsługiwane przez pojedynczego żołnierza) do prowadzenia rozpoznania obrazowego (IMINT). Stanowi to niejako kontynuację zakupów z 2019r. BSP tej klasy (wówczas zakupiono zestawy „Black Hornet III” dla Jednostki Wojskowej Komandosów).

Następnym wartym omówienia kierunkiem są prace nad wykorzystaniem amunicji krążącej w formie tzw. roju, czyli dużej liczby „latających robotów” wykonujących jednocześnie zadania w sposób skoordynowany. We wrześniu 2020r. rozwiązanie takie zademonstrowali Chińczycy z China Academy of Electronics and Information Technology (CAEIT). Do wystrzelenia szeregu „dronów-kamikaze” wykorzystali wyrzutnię (z 48 wyrzutnikami pneumatycznymi) zamontowaną na lekkim pojeździe opancerzonym Dongfeng Mengsh CSK-131 (w wersji trzyosiowej z napędem na wszystkie koła). Do demonstracji użyto prawdopodobnie BBSP Ch-901 posiadające głowicę kumulacyjną o masie około 3 kg. Uwzględniając obserwacje z ostatniej wojny w Górskim Karabachu ilość materiału wybuchowego wystarcza do porażenia większości współczesnych pojazdów opancerzonych. Zastosowanie zaś ww. BBSP do wykonania uderzenia w „roju” stanowi bardzo poważne wyzwanie nawet dla nowoczesnych systemów obrony przeciwlotniczej/powietrznej z uwagi na problemy z wykryciem i porażeniem szybko poruszających się wielu celów cechujących się niewielkimi rozmiarami oraz ograniczoną sygnaturą cieplną, akustyczną czy radarową.
Warte krótkiego omówienia są także postępy w pracach nad środkami rażenia przenoszonymi przez drony rozpoznawczo-uderzeniowe. Amerykanie prowadząc na przełomie sierpnia i września 2020r prace nad wykorzystaniem BSP MQ-9 Reaper do zwalczania pocisków manewrujących uzbroili je w pociski „Sidewinder” AIM-9X Block II naprowadzające się na podczerwień. Z drugiej strony uwzględniając zagrożenie ze strony zintegrowanych systemów obrony powietrznej przeprowadzili również we wrześniu 2020r. pierwsze loty próbne z BSP „Sparrowhead” przenoszonym na zaczepie pod skrzydłem BSP MQ-9 „Reaper”. Docelowo BSP „Sparrowhead” ma po oddzieleniu się ma prowadzić rozpoznanie nad obszarami bronionymi przez ww. systemy obrony powietrznej podczas gdy nosiciel ma znajdować się poza strefą zagrożenia. Przyjęcie takiego rozwiązania oznacza także pogłębienie w przyszłości robotyzacji w przestrzeni powietrznej, gdzie większe BSP będą służyć jako nosiciele mniejszych, wyspecjalizowanych i zarazem tańszych dronów.
Z drugiej strony Amerykanie uwzględniając ewolucję współczesnego pola walki (zwłaszcza w kontekście możliwego konfliktu o dużej intensywności z takimi rywalami jak Rosja czy Chiny) wydają się odchodzić od BSP klasy MALE opartych koncepcyjnie na konstrukcji MQ-1 „Predator” (i jego wersji rozwojowej jaką jest MQ-9A „Reaper”) na rzecz latającego skrzydła bez usterzenia pionowego napędzanego pojedynczym silnikiem odrzutowym. Taka konstrukcja posiadająca cechy obniżonej wykrywalności (stealth) zwiększałaby przeżywalność BSP na polu walki. W tym celu 3 czerwca 2020 US Air Force Material Command Life Cycle Menagement Center wystosował zapytanie (RFI) do amerykańskich firm w sprawie opracowania do 2030r. następcy MQ-9 „Reaper” przeznaczonych do wykonywania misji rozpoznawczo-uderzeniowych.
Znaczne postępy w dziedzinie bezzałogowych platform powietrznych poczynili także Rosjanie. Od marca br. wprowadzają do użytku w swoich siłach zbrojnych BSP „Orion” – pierwszy rozpoznawczo-uderzeniowy BSP klasy MALE[6] własnej konstrukcji o zasięgu 250-300km i możliwości wykonywania lotu na pułapie do 6000m przez 24 godziny. Na Forum Wojskowo-Technicznym „Armija 2020” zaprezentowali także makiety wersji rozwojowych „Oriona” jakimi mają być BSP „Syriusz” i „Helios”. Do 21 stycznia zakończyli także próbne obloty prototypów BSP „Altair” – pierwszego aparatu klasy HALE[7] własnej konstrukcji zdolnego do przenoszenia pokładowej stacji radiolokacyjnej i zaawansowanych głowic optoelektronicznych, a także nosiciela m.in. przeciwokrętowych pocisków rakietowych Ch-35. Jego zasięg przy prędkości przelotowej 150-250km/h i ładunku o masie do 2-2,5t ma wynosić ok. 10 tysięcy kilometrów, a długotrwałość lotu wynosić do 48 godzin. Rosjanie kontynuują także prace BSP S-70 „Ochotnik” inspirowanym zapewne podobnymi konstrukcjami amerykańskimi (np. X-47B „Pegasus”), który w przyszłości ma pełnić rolę „lojalnego skrzydłowego” (w tym m.in. z możliwością zwalczania celów powietrznych) dla rosyjskich Su-57. W bieżącym roku pochwalili się także użyciem amunicji krążącej ZALA „Lancet” i ZALA „Kub” (produkcji koncernu Kałasznikow) podczas prowadzenia działań bojowych w Syrii, a także gotowością do produkcji BSP „Korsar” klasy taktycznej. Tym samym Rosjanie nadrabiają zaległości technologiczne w stosunku do takich państw jak USA, Chińska Republika Ludowa, Izrael czy Turcja.

Na koniec warto wspomnieć o tegorocznych postępach programu „lojalny skrzydłowy” („Loyal Wingman”) w ramach którego Boeing Defence Australia w maju zaprezentował pierwszy prototyp BBSP, w październiku rozpoczął próby kołowania oraz przygotowania do jego oblotu przewidzianego na koniec br. Prototyp wykorzystuje tzw. „sztuczną inteligencję” opartą o oprogramowanie „Skyborg” co pozwoli znacznie rozszerzyć możliwości platform załogowych i bezzałogowych. Tym samym piloci nowoczesnych samolotów (takich jak np. F-35 czy F/A-18E/F) będą mieli do pomocy „samoloty-roboty” zdolne do samodzielnego wykonania większości elementów misji we własnym zakresie bez potrzeby ingerencji pilota lub kontrolera na ziemi. Wdrożenie w przyszłości „lojalnych skrzydłowych” do służby w siłach zbrojnych państw zmieni całkowicie sposób wykorzystania samolotów wielozadaniowych czyniąc z nich bardziej samoloty dowodzenia ww. formacjami „latających robotów” niż bezpośrednio wykonujące dotychczas „tradycyjne” zadania (np. związane z wywalczeniem przewagi w powietrzu, niszczeniem celów naziemnych, prowadzeniem rozpoznania czy walki radioelektronicznej).
- Morskie platformy bezzałogowe.
Amerykańska marynarka wojenna (US Navy) podejmuje kroki mające wzmocnić jej flotę złożoną z załogowych okrętów nawodnych za pomocą oceanicznych bezzałogowych okrętów nawodnych (USV[8]) w ramach programu NOMARS[9]. W tym celu we wrześniu br. Departament Obrony przyznał dwa kontrakty na opracowanie prototypów USV zdolnych do samodzielnej długotrwałej żeglugi na rozległych obszarach morskich, nawet w niekorzystnych warunkach hydrometeorologicznych. Kontrakty obejmują duży bezzałogowy okręt nawodny (LUSV) oraz transportowiec (tzw. Sea Train) rozwijany pod kierunkiem amerykańskiej Agencji Zaawansowanych Projektów Badawczych Obrony (DARPA). LUSV prawdopodobnie stanowił będzie dalsze rozwinięcie koncepcji innego USV – „Sea Hunter” zaprezentowanego
w ubiegłym roku. Planowane zasadnicze zadania przyszłego LUSV to zwalczanie obiektów nawodnych i położonych na lądzie. Platforma ma się cechować wysokim poziomem autonomii działania, wytrzymałością konstrukcji, zdolnością do precyzyjnej nawigacji, a także współdziałania z tradycyjnymi okrętami wojennymi oraz innymi bezzałogowymi platformami morskimi oraz powietrznymi w ramach mieszanych zespołów. Z kolei opracowanie bezzałogowego transportowca rozwijanego pod nadzorem DARPA ma pozwolić na zapewnienie transportu za pomocą działających w sposób skoordynowany grupach ww. platform działających na zasadzie zbliżonej do pociągów (stąd określenie – Sea Train). Do sterowania ww. grupami wykorzystywano by komputery poszczególnych statków połączone w sieć, które byłyby kontrolowana zdalnie. Ich pozyskanie umożliwić ma zaopatrywanie rozproszonych baz na oceanach. Tym samym decentralizacja dostaw zaopatrzenia, ludzi i sprzętu drogą morską z wykorzystaniem ww. transportowców utrudniłaby w znaczny sposób ich zakłócenie przez potencjalnego przeciwnika, a także czyniłaby sam transport tańszym.

28 października br. w Ankarze turecka firma Ares Shipyard Inc., zaprezentowała projekt morskiej bezzałogowej opancerzonej platformy ULAQ, którego prototyp ukończono pod koniec sierpnia br. Za jej opracowanie odpowiada ww. stocznia razem z Meteksan Defense. Jak zapowiedział podczas prezentacji dyrektor generalny Meteksan Defence - Selcuk Kerem Alparslan, pierwszy prototyp ULAQ ma być gotowy jeszcze w grudniu 2020. Zgodnie z założeniami ULAQ ma być w stanie rozwinąć prędkość do ok. 35 węzłów, a zasięg pływania ma wynosić 216Mm. Zasadniczym jego przeznaczeniem mogą być m.in.: patrolowanie i dozorowanie obszarów morskich, prowadzenie rozpoznania i WRE, zwalczanie okrętów nawodnych i podwodnych, działania przeciwminowe, gaszenie pożarów ma platformach morskich czy działania poszukiwawczo-ratownicze. ULAQ ma być wyposażony w stację radiolokacyjną oraz głowice optoelektroniczne umożliwiające wykrywania i śledzenia celów.
Jego szczegółowe wyposażenie i uzbrojenie będzie oczywiście konfigurowane w zależności od planowanej funkcji czy zadania. Przykładowo do zwalczania celów nawodnych ULAQ może być uzbrojony w cztery kierowane pociski rakietowe CIRIT i dwa ppk L-UMTAS produkcji Roketsan. Oprócz ww. uzbrojenia platforma będzie wyposażana także w inne środki do prowadzenia rozpoznania, a także WRE (wg. potrzeb). Jak wyjaśnili twórcy, USV można będzie można sterować z dowolnej platformy (morskiej, powietrznej, lądowej, zarówno mobilnej jak i stacjonarnej) z wykorzystaniem zabezpieczonej kryptograficznie łączności radiowej. Możliwe będzie także jego autonomiczne użycie dzięki wykorzystaniu tzw. „sztucznej inteligencji”. Podobnie jak w amerykańskiej koncepcji, także ULAQ będzie mógł operować w ramach formacji mieszanych złożonych z załogowych i bezzałogowych platform.
Innym ciekawym kierunkiem koncepcji użycia „morskich robotów” są zmiany jakie mogą spowodować w taktyce wykrywania i niszczenia min morskich. Pod koniec października br. francuska minister obrony Florance Parly zatwierdziła rozpoczęcie nowego programu przyszłościowego systemu zwalczania min” SLAM-F[10]. Jego celem ma być umożliwienie prowadzenia działań przeciwminowych spoza strefy zagrożenia z wykorzystaniem morskich bezzałogowych platform i robotów. Generalna Dyrekcja ds. Uzbrojenia (DGA[11]) ma na celu generacyjne odnowienie francuskich zdolności w walce z minami morskimi. Sam system ma się składać z czterech zasadniczych części:
- podsystemu bezzałogowych pojazdów nawodnych i podwodnych sterowanych z lądu lub z przeznaczonego do tego okrętu. Pojazdy te są już opracowywane w ramach francusko-brytyjskiego programu „Morskie operacje przeciwminowe” MMCM (Maritime Mines Counter-Operations);
- okrętów wojny minowej BGDM[12] dedykowanych do kierowania bezzałogowymi systemami nawodnymi i podwodnymi;
- nowej generacji okrętów-baz dla płetwonurków minerów BBPD NG[13];
- podsystemu opracowania i wykorzystania danych wojny minowej SEDGM[14].
Realizacja ww. programu spowodować może swoistą rewolucję w prowadzeniu działań przeciwminowych na morzu z uwagi na nie wchodzenie załogowych okrętów w strefę zagrożenia. Tym samym kadłuby ww. okrętów te nie będą musiały być wykonane z materiałów spełniających surowe normy przewidziane dla jednostek przeznaczonych do wykrywania
i zwalczania min morskich. Co więcej przewiduje się, że część robotów podwodnych będzie mogła być transportowana i sterowana z wykorzystaniem większych bezzałogowych platform nawodnych[15].
Podsumowanie.
Nie da się obecnie zaprzeczyć, że roboty w postaci bezzałogowych platform czy pojazdów stały się immanentną częścią współczesnych sił zbrojnych. Postęp w ich rozwoju oraz koncepcji użycia znacznie przyspiesza, prowadząc do gwałtownych zmian w sposobach prowadzenia walki zbrojnej. Ich zastosowanie już obecnie umożliwia uzyskanie znacznej przewagi nad przeciwnikiem stosującym tradycyjne metody prowadzenia działań bojowych przy minimalizacji ryzyka poniesienia strat ludzkich po stronie wykorzystującej ww. roboty. Na podstawie przedstawionych w artykule przykładów można przewidywać dalszy rozwój całych rodzin robotów wykonujących zadania w zróżnicowanych środowiskach zarówno
w ramach formacji jednolitych (tj. składających się wyłącznie z robotów) oraz mieszanych. Można przypuszczać, że coraz większego znaczenia w sterowaniu nimi będzie odgrywała tzw. „sztuczna inteligencja”, która w połączeniu z sensorami, wydajnymi źródłami zasilania oraz komputerami umożliwi im samodzielną realizację zadań oraz zdobywanie doświadczenia. Tym samym ich rozwój może w przyszłości prowadzić do stopniowego ograniczenia liczebności sił zbrojnych na rzecz większego ich nasycenia robotami posiadającymi coraz większe możliwości.
Przyglądając się postępującej robotyzacji sił zbrojnych nie należy jednak zapominać, że już teraz są środki umożliwiające zarówno kinetyczne jak i niekinetyczne oddziaływanie na ww. roboty. Obecnie do tych pierwszych zaliczyć można wszelkiego rodzaju broń strzelecką, artyleryjską czy rakietową, a do tych drugich systemy zakłócania radioelektronicznego czy narzędzia do przeprowadzenia cyberataków. Już w niedalekiej przyszłości z pewnością dołączą do nich systemy rażenia wykorzystujące wiązki energii skierowanej. Nie zmieni to jednak faktu, że łatwiej będzie pogodzić się społeczeństwu z utratą robotów, których koszty i czas produkcji będą z czasem maleć, niż ludzi, których wychowanie, kształcenie i szkolenie wojskowe trwa wiele lat i których darzy się uczuciem. Stąd też w opinii autora postęp robotyzacji i automatyzacji w siłach zbrojnych jest nieunikniony, a one same z czasem doprowadzą do rewolucyjnych zmian we wszystkich domenach przyszłego pola walki. Warto więc przyglądać się rozwojowi robotów oraz programów im towarzyszących i w nie inwestować.
ppłk rez. dr Marek Gryga
[1] Robotics and Autonomous Systems – przyp. autora
[2] Mission Enabler Technologies-Demonstrator – pojazd wyposażony w szereg funkcji i czujników współpracujących z systemem uzbrojenia i pozyskiwania danych z wozów bezzałogowych. Załoga MET-D otrzymała m.in. nowe wyświetlacze pozwalające na kontrolowanie platform bezzałogowych i w efektywniejszy sposób przekazujące informacje poprawiające jej świadomość sytuacyjną. Szerzej na temat tego programu pisał Marek Dąbrowski w artykule „Bradley „pojazdem-matką” dla robotów bojowych” w Defence24.pl w 2019r.
[3] Chemical, Biological, Radiological, Nuclear – w polskiej terminologii Broni Masowego Rażenia na którą składają się: bojowe środki trujące, broń biologiczna, broń nuklearna, odpady radioaktywne (jako produkty uboczne użycia broni nuklearnej lub przemysłu wytwarzającego energię nuklearną – przyp. autora
[4][4] Artificial Intelligence - to zdolność maszyn do wykazywania ludzkich umiejętności, takich jak rozumowanie, uczenie się, planowanie i kreatywność. Sztuczna inteligencja umożliwia systemom technicznym postrzeganie ich otoczenia, radzenie sobie z tym, co postrzegają i rozwiązywanie problemów, działając w kierunku osiągnięcia określonego celu
[5] Świadomość sytuacyjna to znajomość składowych przestrzeni walki niezbędnych do podejmowania świadomych decyzji. Słownik terminów i definicji NATO AAP-6, NATO Standarisation Agency 2012, s.361
[6] Medium Altitude Long Endurance – oznacza możliwość wykonywania nieprzerwanych długotrwałych lotów (z reguły trwających 24-48 godzin) na średniej wysokości (3000-9000m). BSP tej klasy są z reguły maszynami wykonującymi zadania głównie na rzecz dowództw poziomu operacyjnego – przyp. autora
[7] High Altitude Long Endurance - oznacza możliwość wykonywania nieprzerwanych długotrwałych lotów (z reguły trwających 24-48 godzin) na dużej wysokości (powyżej 9000m). BSP tej klasy są z reguły maszynami wykonującymi zadania głównie na rzecz dowództw poziomu strategicznego – przyp. autora
[8] Unmanned Surface Vessel
[9] No Manning Required Ship
[10] Système de Lutte Anti-Mines Futur
[11] Direction Générale de l’Armement
[12] Bâtiments de guerre des mines
[13] Bâtiments bases de plongeurs démineurs nouvelle génération
[14] Système d’exploitation des données de guerre des mines
[15] Opracowano na podstawie M. Dura, Co we Francji zastąpi niszczyciele min? [ANALIZA], zamieszczonego na portalu Defence 24.pl w dn. 22.11.2020r. (https://www.defence24.pl/co-we-francji-zastapi-niszczyciele-min-analiza).




























