











- ANALIZA
USA: Drony do nadzoru oceanów. W tle miliardy dolarów [ANALIZA]

Amerykanie w coraz większym stopniu przygotowują się do wprowadzenia systemów bezzałogowych do nadzoru mórz i oceanów. Ich działania mają zapewnić zarówno permanentną obserwację powierzchni wody z dronów powietrznych i nawodnych, jak i śledzenie sytuacji podwodnej z powierzchni oraz przez drony podwodne.

Szybujące drony podwodne — glidery
Najtrudniejszym zadaniem jest zapewnienie środków do ciągłego obserwowania sytuacji podwodnej, ponieważ tego nie można zrobić za pomocą statków powietrznych i systemów satelitarnych. Szczególnie przydatne do tego celu wydają się być „inteligentne”, działające autonomicznie podwodne pojazdy „szybujące” - glidery (sea gliders) Takie podwodne szybowce nie korzystają z napędu, ale pomimo tego mogą przez wiele miesięcy, poruszać się w głębinach wykorzystując energię słoneczną, prądy morskie oraz różnice temperatur w warstwach wody (stąd przez analogie stosuje się nazwę „szybowiec”).
Prace nad tego rodzaju autonomicznymi dronami są nadzorowane przez naukowców z laboratorium badawczego amerykańskiej marynarki wojennej NRL (U.S. Naval Research Laboratory). Ich celem jest stworzenie szybowców, które oficjalnie poprawiłyby zdolność US Navy do przewidywania warunków oceanicznych. Jest to konieczne m.in. do działania amerykańskim okrętom podwodnym. To dlatego większość z ponad 130 gliderów w US Navy jest wykorzystywana dla potrzeb dowództwa morskiej meteorologii i oceanografii (Naval Meteorology and Oceanography Command). Nic jednak nie stoi na przeszkodzie, by w razie potrzeby wykorzystać glidery do alarmowania o nagłym wykryciu jakiegoś niebiologicznego obiektu podwodnego.

Sprawa z prowadzeniem tego rodzaju nadzoru jest o tyle trudna, że chodzi o ogromne obszary i przekazywanie danych w czasie quasi-rzeczywistym. Stąd naukowcy z NRL nie tylko pracują nad samymi szybowcami podwodnymi, ale również nad optymalnym sposobem ich rozmieszczania i wykorzystaniem w grupach. Takie działanie zespołowe dronów jest związane z wprowadzeniem nowych technik pilotowania, do czego wykorzystano wcześniej opracowane oprogramowanie do sterowania szybowcami GHOST (Guidance for Heterogenene Observation Systems). Musiało ono zostać zmodyfikowane, ponieważ wcześniej zapewniało ono tylko „zoptymalizowane użycie pojedynczego szybowca w warunkach zdefiniowanych przez użytkownika”.
Jak na razie prace nad zespołowym działaniem dronów opierają się na dwóch, pozornie wykluczających się zasadach. Po pierwsze poszczególne szybowce nie mogą się znajdować zbyt blisko siebie, ponieważ trudno jest wtedy skorelować zebrane przez nie dane. Po drugie glidery nie mogą się znajdować zbyt daleko, ponieważ tworzą się wtedy luki w mapie przebadanych akwenów. Dodatkowo szybowce poruszają się najczęściej bardzo wolno i są podatne na niespodziewane zmiany środowiska wodnego (np. prądy, wiry, itp.). Znaleziono jednak rozwiązanie i zaktualizowane oprogramowani GHOST zostało już przebadane u wybrzeży Karoliny Północnej z wykorzystaniem sześciu gliderów.
Czytaj też: US Navy: Powstaje flota „okrętów–duchów”
Drony nawodne
O wiele bardziej zaawansowane prace są realizowane w Stanach Zjednoczonych w odniesieniu do bezzałogowych pojazdów nawodnych USV (Unmanned Surface Vehicle). Tutaj postępy są już na tyle duże, że amerykańska marynarka wojenna zamierza zainwestować w rozwijanie tej dziedziny około 982,1 miliona dolarów w ciągu najbliższych od pięciu do dziesięciu lat.

Firmy wybrane do tego projektu mają możliwość ubiegania się w Dowództwie systemów morskich NSSC (Naval Sea Systems Command) o zamówienia w co najmniej sześciu kategoriach. Jednym z faworytów w tej rywalizacji jest firma Peraton, która otrzymała na ten cel grant o wartości 27,5 miliona dolarów i to we wszystkich sześciu domenach obejmujących: ładowany moduł zadaniowy, sensory niewchodzące w skład modułów zadaniowych, systemy wsparcia misji, zdalnie sterowany i autonomiczny systemy kontroli pojazdu, lądowe i platformowe systemu zabezpieczenia oraz wsparcie logistyczne. Wszyscy ewentualni kontrahenci będą mogli rywalizować o zlecenia związane ze wsparciem już istniejących i przyszłych bezzałogowych systemów nawodnych USV.

W tej dziedzinie Amerykanie mają już bowiem rozwiązania, które wykazały się dużymi możliwościami w czasie prób morskich. Przypuszcza się, że bazą dla przyszłych, patrolowych dronów nawodnych może być bezzałogowy trimaran „Sea Hunter”, którego wielkość zapewnia samodzielne działanie w dużym oddaleniu od własnych baz i okrętów-matek. Program jest nadzorowane przez Biuro badawcze US Navy ONR (Office of Naval Research) i nie obejmuje już tylko, jak zakładano na początku, modułów zadaniowych do wykrywania okrętów podwodnych i zwalczania min, ale również badanie innego wyposażenia: rozpoznawczo-obserwacyjnego oraz uzbrojenia do zwalczania okrętów podwodnych.
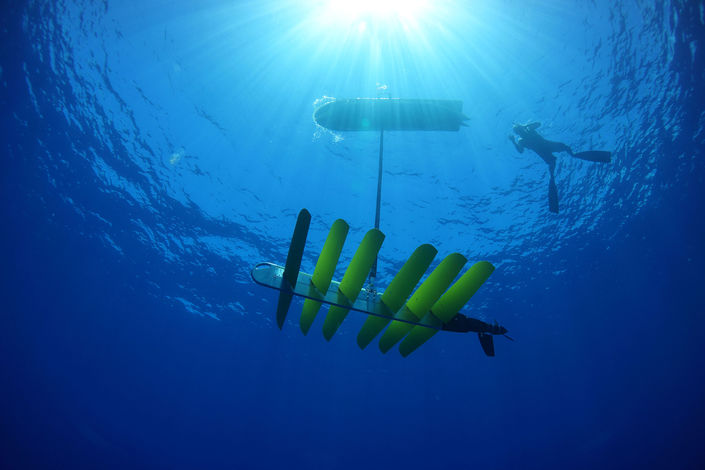
Przykładem rozwiązania pośredniego pomiędzy gliderami i bezzałogowymi pojazdami nawodnymi USV jest system bezzałogowy Wave Gliders. Jest to zestaw wspólnie działających: drona nawodnego (pływającego na powierzchni) i holowanego przez niego drona podwodnego, który jest zanurzony na głębokości około ośmiu metrów. Wyróżniającą cechą tego zestawu jest możliwość działania w oparciu jedynie o naturalne źródła energii (energia słoneczna i falowanie). Jest to więc system przyjazny dla środowiska, który może działać samodzielnie przez kilkanaście miesięcy, bez konieczności uzupełniania paliwa.

Drony powietrzne
Wydaje się, że bezzałogowe statki powietrzne to dziedzina, w której Amerykanie osiągnęli najwięcej jeżeli chodzi o nadzór akwenów morskich. Udało się im już bowiem, w 2017 r. wprowadzić do służy system obserwacyjny oparty na bezzałogowych aparatach latających MQ-4C Triton, które przebywając w powietrzu przez ponad 20 godzin, w wielu zadaniach mogą bez problemu zastępować załogowe, morskie samoloty patrolowe, takie jak np. P-8 Poseidon i P-3 Orion.

Jednak pomimo że drony te zalicza się do klasy HALE (dużego pułapu — do 16700 m i dużej autonomiczności — ponad 24 godziny) to jednak Amerykanie nie poprzestają na nich i szukają sposobu na prowadzenie jeszcze dłuższego nadzoru przez bezzałogowce — latające bez przerwy przez kilkadziesiąt dni. Przykładem może być opracowany przez koncern Boeing dron Phantom Eye z dwoma silnikami napędzanymi paliwem wodorowym oraz skrzydłami o bardzo dużej rozpiętości. Zakłada się, że w wersji docelowej mógłby on przebywać w powietrzu nawet przez 20 dni.
Jaki cel w tej dziedzinie postawiła sobie amerykańska marynarka wojenna, jak na razie nie wiadomo.














WIDEO: F-35 vs. JAK-130 | Fregata tonie | Kuwejt strąca F-15 - Defence24Week #151