











- WIADOMOŚCI
Nowy element amerykańskiego systemu śledzącego okręty podwodne
Już wiadomo, że sonar dla prototypu bezzałogowego drona nawodnego ACTUV będzie wykonany przez koncern Raytheon.
ACTUV (Anti-submarine warfare Continuous Trail Unmanned Vessel) to nawodny bezzałogowy system ciągłego śledzenia okrętów podwodnych, który jest opracowywany przez korporację SAIC (Science Applications International Corporation) na zlecenie Agencji Zaawansowanych Obronnych Projektów Badawczych Departamentu Obrony Stanów Zjednoczonych DARPA (Defense Advanced Research Projects Agency).
Przeczytaj także: US Navy zamawia podwodny skafander rodem z filmów S-F
W ramach tego programu ma powstać maksymalnie autonomiczna, eksperymentalna, bezzałogowa platforma pływająca, która wykorzystując zamontowany na niej kompleks obserwacji technicznej będzie w stanie przez długi czas (2-3 miesiące) samodzielnie poszukiwać konwencjonalne okręty podwodne najnowszej generacji. Założono przy tym, że na żadnym etapie działania takiego dronu nie będzie wymagana obecność załogi.
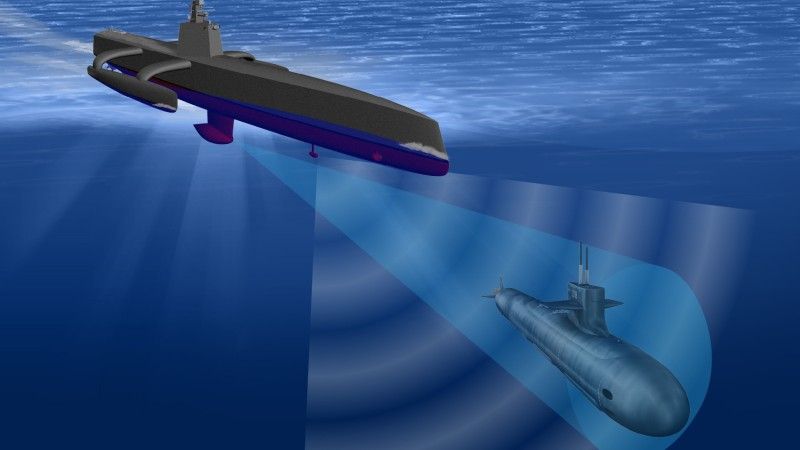
Opracowana wstępnie koncepcja użycia ACTUV, zakłada jego ciągłe śledzenie przez okręty nawodne i podwodne, śmigłowce lub samoloty patrolowe, tak by po wykryciu przez dron obiektu podwodnego, można go było dokładnie zlokalizować i rozpocząć proces identyfikacji. Agencja DARPA postawiła sobie za cel stworzenie systemu wykrywania konwencjonalnych okrętów podwodnych, którego koszty nabycia i utrzymania były wielokrotnie niższe nić wartość jednostek przez niego poszukiwanych. Jest to całkowicie zrozumiałe, gdy się weźmie pod uwagę koszt nowoczesnych jednostek zwalczania okrętów podwodnych, które poza koniecznością posiadania rozbudowanego sytemu podwodnej obserwacji technicznej, muszą być również wyposażone w skuteczne systemy obrony przeciwlotniczej oraz systemy zwalczania okrętów nawodnych.
Prace nad projektem podzielono na cztery etapy. Pierwszy, już zakończony polegał na przedstawieniu różnych koncepcji rozwiązania tego problemu (z kosztorysem i sposobem późniejszego wykorzystania zaproponowanego rozwiązania). Kontrakty za 2 miliony dolarów otrzymały wtedy trzy podmioty. Northrop Grumman, QinetiQ North America i korporacja SAIC (w skład której wchodzą m.in. Uniwersytet Carnegie Mellon z Pensylwanii, Laboratorium NASA Jet Propulsion z Kalifornii oraz koncern stalowy Oregon Iron Works z Oregonu znany m.in. z budowy jednostki pływającej Sealion II w technice stealth dla sił specjalnych). Wygrała korporacja SAIC, która przystąpiła do drugiej fazy programu, otrzymując 58,4 miliona dolarów na zaprojektowanie prototypu dronu ACTUV.
Przeczytaj również: US Navy kupiła osiem nowych dronów MQ-8C Fire Scout
SAIC zaproponowała wykorzystanie bezzałogowego trimaranu o długości około 40 m, którego system sonarowy będzie mieszczony w wysuwanym spod środkowego kadłuba opływniku. Wstępnie założono, że będzie on napędzany silnikami elektrycznymi i może być on działać sterowany zdalnie lub w pełni autonomicznie. Trzeci etap prac nad ACTUV ma polegać na zbudowaniu prototypu, a czwarty na przeprowadzeniu na nim prób. Wstępnie założono, że czwarty etap rozpocznie się w 2015 r.
Raytheon zaproponował dla ACTUV system sonarowy zbudowany w oparciu o koncepcję MS3 (Modular Scalable Sonar System), wykorzystywaną nie tylko przy budowie nowych sonarów, ale także w czasie modernizacji starszych systemów hydroakustycznych (np. sonarów typu AN/SQS-56 zamontowanych na fregatach Oliver Hazard Perry). Koncepcja MS3 jest propozycją rozwiązania problemu szybko starzejących się systemów elektronicznych na okrętach US Navy (i nie tyko). Zauważono, że różne elementy starzeją się „moralnie i fizycznie” z różną prędkością i nie zawsze konieczna jest modernizacja wszystkiego, a często wystarczy tylko naprawa niewielkiej części całego urządzenia. Tak więc zaczęto stosować to, co wcześniej stało się podstawą budowy komputerów osobistych, których eksploatacja jest związana z ciągłym, choć w sumie tanim rozszerzaniem ich możliwości.
Postępujące według tej filozofii Raytheon wprojektowuje w sonarach wszędzie gdzie to jest możliwe elementy dostępne na rynku komercyjnym (COTS), w tym procesory, monitory, pamięci, oprogramowanie, itp. Stosuje się również powszechnie wykorzystywane standardy przesyłania informacji, co ułatwia połączenie gotowego urządzenia do dowolnego, ale zaprojektowanego w ten sam sposób systemu dowodzenia i kierowania. Przy czym zachowane zostają co najmniej takie same osiągi jak te, w budowanych po staremu systemach.
Nie znane są szczegóły, jaki sonar ma być zamontowany na ACTUV. Część agencji przekazała, że będzie on pracował na średnich częstotliwościach, ale to oznacza, że nie będzie mógł on być wykorzystany do wykrywania i identyfikacji min, ani identyfikacji szczególnie wyciszonych okrętów podwodnych. Prawdopodobnie Raytheon zaproponuje kompleks hydroakustyczne z przynajmniej dwoma systemami antenowymi, które rozszerzą zakres zadań, jakie ACTUV będzie mógł wykonywać. Ale jak będzie naprawdę przekonamy się za kilka lat.
Maksymilian Dura













