











- WIADOMOŚCI
ECA dostarcza użytkownikom pierwsze bezzałogowe systemy przeciwminowe


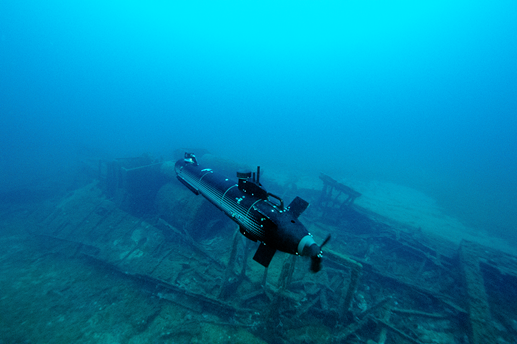
Sterowany światłowodowo, samobieżny ładunek wybuchowy K-STER C – fot. ECA Group 
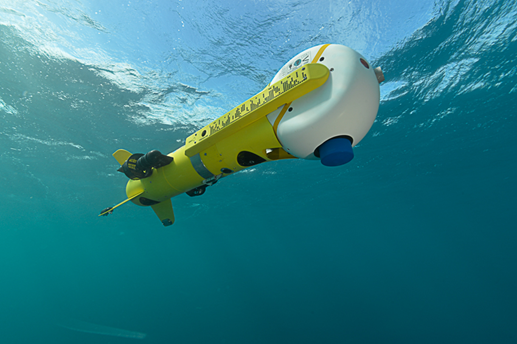
Podwodny robot inspekcyjny SEASCAN MK2 – fot. ECA Group
Francuska grupa przemysłowa ECA poinformowała, że od początku 2016 r. dostarczyła kilka w pełni zrobotyzowanych systemów przeciwminowych dla sił morskich dwóch państw – w tym do Kazachstanu. Ujawniając sposób realizacji obu kontraktów, Francuzi podkreślili, że były to pierwsze w pełni gotowe, bezzałogowe systemu przeciwminowe zaoferowane na rynku. Dzięki nim po raz pierwszy użytkownicy mają możliwość realizowania w pełnym zakresie zadań związanych ze zwalczaniem min, cały czas pozostawiając ludzi poza strefą zagrożenia.
W standardowych działaniach okręty przeciwminowe (np. trałowce lub niszczyciele min) mają za zadanie wykryć obecność min swoimi sonarami, co może się stać również po wejściu głęboko na zaminowany akwen. Zawrócenie lub zmiana kursu może spowodować eksplozję – szczególnie wtedy, gdy przeciwnik zastosował miny inteligentne.
W przypadku rozwiązania zaproponowanego przez ECA takie zagrożenie nie istnieje. Wykrywanie pola minowego odbywa się bowiem przez sonary o wysokiej rozdzielczości zamontowane na bezzałogowych pojazdach podwodnych, lub zdalnie sterowanych, nawodnych łodziach motorowych (zbudowanych na bazie łodzi INSPECTOR Mk2). Wszystko to jest sterowane lub programowane z okrętów-matek, które cały czas mogą pozostawać daleko poza zagrożonym akwenem.
Po wykryciu obiektu minopodobnego system jest w stanie przeprowadzić również proces identyfikacji i neutralizacji niebezpieczeństwa. Do rozpoznania, czy rzeczywiście znaleziony obiekt to mina, wykorzystywany jest robot inspekcyjny – np. typu SEASCAN MK2. Robot ten może działać pod woda przez ponad 3 godziny poruszając się z maksymalną prędkością 6 węzłów do głębokości 300 m. Światłowodowy przewód sterujący pozwala na jego wykorzystanie w odległości do 2000 m.

Na podstawie obrazu przekazywanego spod wody w czasie rzeczywistym, przeprowadzony jest proces klasyfikacji i podejmowana jest decyzja, co do dalszego sposobu działania. W przypadku, gdy obiekt zostanie zidentyfikowany jako mina, do jej zniszczenia wykorzystuje się przede wszystkim sterowany światłowodowo, samobieżny ładunek wybuchowy K-STER C. Może on działać przez ponad godzinę, z maksymalną prędkością 6 w, do głębokości 300 m i w zasięgu około 2000 m. Jego głowica niszcząca zawiera około 2,5 kg silnego materiału wybuchowego, a dodatkowo można nią obracać - kumulując wybuch na atakowanym celu. W ten sposób zwiększono prawdopodobieństwa zniszczenia miny.
Oba roboty podwodne mogą być opuszczane, podnoszone (w przypadku SEASCAN MK2) oraz sterowane przewodowo z okrętu-matki, pozostającego w dużej odległości od zagrożonego rejonu lub z wysłanego na zaminowany akwen, bezzałogowego, zdalnie sterowanego pojazdu nawodnego.
Cały system nie musi więc operować w oparciu o drogie, wyspecjalizowane okręty przeciwminowe, ale o jednostki pływające posiadające tylko odpowiednio dużo miejsca na pokładzie. Może też być wykorzystywany z brzegu. Takie rozwiązanie znacznie ogranicza koszty prowadzenia operacji przeciwminowych i znacząco je przyśpiesza. Dostarczenie w rejon zagrożony standardowo wolnych trałowców lub niszczycieli min jest bowiem czasochłonne i dlatego o wiele lepszym rozwiązaniem jest przetransportowanie samego systemu w kontenerach do wskazanego akwenu.





























