











- WIADOMOŚCI
Amerykanie budują podwodne drony dla płetwonurków


Fot. M.Dura 
Nie wiadomo, czy przy pracach nad DUBROV Amerykanie skorzystają z już opracowanych skuterów podwodnych, produkowanych również w wersji wojskowej. Fot.M.Dura 
Wizja pojazdu DBROV. Fot. U.S. Navy Photo
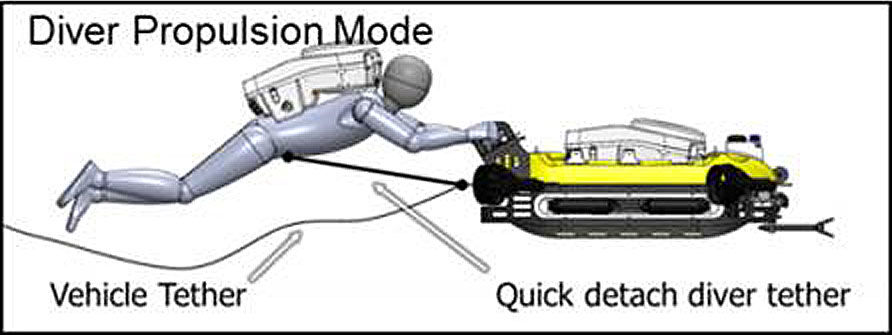
Amerykańska marynarka wojenna pracuje nad zdalnie sterowanym, bezzałogowym pojazdem podwodnym DBROV (Dive Buddy Remotely Operated Vehicle), który będzie asystował płetwonurkom podczas wykonywania przez nich zadań bojowych.
Prace nad nowym bezzałogowcem prowadzą wspólnie centrum badawcze amerykańskiej marynarki wojennej NSWC PCD (US Naval Surface Warfare Center Panama City Division) oraz specjaliści morskiej szkoły podyplomowej (Naval Post Graduate School) w Monterey. Jest to część programu N-STAR prowadzonego przez biuro badawcze ONR (Office of Naval Research).
DBROV ma pomagać płetwonurkom w poruszaniu się pod wodą i w transporcie sprzętu, w prowadzeniu poszukiwań, w nawigacji oraz w łączności. Jest to, tak naprawdę, wielozadaniowy pojazd hybrydowy, który może być wykorzystywany jako transporter dla nurka DPV (Diver Propulsion Vehicle), jako zdalnie sterowany pojazd podwodny ROV (Remotely Operated Vehicle), jako autonomiczny pojazd podwodny AUV (Autonomous Underwater Vehicle) lub w dowolnej kombinacji tych trzech rozwiązań.
Amerykanie podkreślają, że środowisko podwodne nadal jest niezwykle niesprzyjające dla człowieka. Czas, w jakim ludzie mogą działać pod wodą, przy nawet najlepiej wyszkolonych płetwonurkach jest bardzo ograniczony i dlatego trzeba zrobić wszystko, by był on jak najlepiej wykorzystany. „Podwodny kumpel” („Dive Buddy”) ma w tym pomóc, zwiększając świadomość sytuacyjną, ułatwiając i przyśpieszając działanie oraz spowalniając utratę sił.

Połączenie różnych zadań w jednym rozwiązaniu daje ponadto możliwość działania bez konieczności wysyłania ludzi w niebezpieczny rejon, również w trybie autonomicznym po zadanej trasie i zgodnie z założonym harmonogramem.
DBROV może przenosić pełny zestaw wyposażenia potrzebny do wykonywania zadań przez płetwonurków i do utrzymywania ich przy życiu. Pełni przy tym rolę nie tylko skutera podwodnego, ale również systemu rozpoznania miejsca nurkowania, posiadając na swoim wyposażeniu sonar. DBROV jest również swoistym „podwodnym węzłem łączności” pozwalającym na przekazywanie na powierzchnie informacji głosem i za pomocą obrazu wideo.
Jako przykład możliwości opracowywanego rozwiązania przedstawia się misje ratownicze, polegające na ewakuacji niejawnego i zatopionego sprzętu z akwenów silnie kontrolowanych przez przeciwnika. Za każdym razem będzie przy tym możliwość wyboru, czy zadanie ma być realizowane z udziałem ludzi, czy też w sposób zdalny lub autonomiczny.
Specjaliści podkreślają bowiem, że niektóre zadania są proste i powtarzalne – dlatego mogą być wykonywane przez podwodne roboty, nie ograniczone czasem przebywania pod wodą jak ludzie. Natomiast misje wymagające większej sprawności mogą być realizowane przez płetwonurków, którym będą asystowały odpowiednio wyposażone pojazdy.

Za każdym razem podkreśla się jednak, że celem prac nad DBROV nie jest w żadnym przypadku zastąpienie ludzi robotami. Według konstruktorów pojazdu ma on być po prostu kolejnym narzędziem dla płetwonurka i dobrym przykładem symbiozy ludzi i maszyn.
Wszystkie prace konstrukcyjne nad Dive Buddy są prowadzone przez NSWC PCD. Amerykanie mają nadzieję, że nowe rozwiązanie przejdzie serię testów w miesiącach letnich br. i zostanie oficjalnie zaprezentowane przedstawicielom amerykańskiej marynarki wojennej pod koniec 2016 r. (finansowego).
Jak na razie nie wiadomo jak BBROV będzie docelowo wyglądał. Najbardziej optymalnym rozwiązaniem wydaje się być wykorzystanie już istniejących rozwiązań i np. wprowadzenie modu zdalnego sterowania do oferowanych w dużym wyborze podwodnych skuterów. Amerykanie jednak często wolą projektować wszystko od zera, co pozwala im, oczywiście, lepiej spełnić założone wymagania, ale wydłuża czas, zwiększa koszty i ryzyko niepowodzenia programu.





























