











- WIADOMOŚCI
ECA: Drony podwodne sterowane przez powietrzne bezzałogowce

Pionowzlot IT180. Fot. M.Dura 
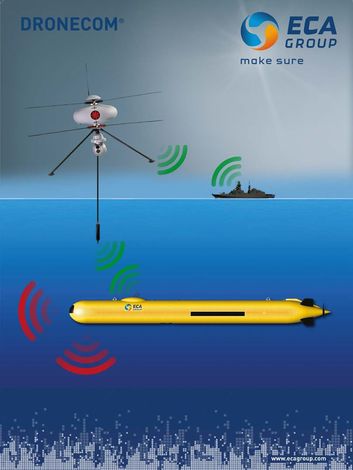
Zasada działania systemu łączności DRONECOM proponowanego przez grupę ECA. Fot. ECA Group
Francuska grupa przemysłowa ECA opracowała system łączności DRONECOM – który łączy bezzałogowe pojazdy podwodne z dronami powietrznymi i systemami kierowania na okrętach lub brzegu. W ten sposób rozszerza się obszar jaki można zabezpieczyć bezzałogowymi systemami podwodnymi – daleko poza horyzont radiowy i zasięg akustyczny.
ECA zaproponowała rozwiązanie, które eliminuje ograniczenia w wykorzystaniu bezzałogowych systemów związane z istnieniem tzw. horyzontu radiowego i zasięgu akustycznego. Jest to szczególnie widoczne w przypadku współpracy dronów podwodnych z okrętami, kiedy ten zasięg tak naprawdę jest ograniczony do kilkunastu kilometrów (ze względu na niskie wyniesienie anten oraz ograniczenia w rozchodzenia się dźwięku w wodzie).
Tymczasem możliwości bezzałogowych pojazdów podwodnych są większe. Jeden taki dron może bowiem przeszukiwać dno morskie przez około 20 godzin z intensywnością 2 km2 na godzinę. Jeżeli zastosuje się przy tym poszukiwania z wykorzystaniem grupy np. czterech bezzałogowców to w ciągu jednego zadania możliwe jest dokładne przeszukanie akwenu o powierzchni około 150 km2. Taki obszar najczęściej „wychodzi” poza zasięg łączności radiowej i akustycznej.
W celu przesunięcia horyzontu radiowego i akustycznego, firma ECA zaproponowała wykorzystanie do retranslacji opracowany przez siebie bezzałogowy pionowzlot IT180. Z urządzeń na jego pokładzie złożono szybkie łącze komunikacyjne z podwodnymi dronami, które przekazując dane z sensorów dronów podwodnych (przede wszystkim sonarów) operatorom na okręcie (lub na brzegu) pozwala od razu na ich interpretację i - jeżeli będzie taka potrzeba - na modyfikowanie sposobu realizowania misji.
Francuzi podkreślają przy tym, że w normalnej działalności nie ma potrzeby ciągłego przekazywania w czasie rzeczywistym surowych danych rozpoznawczych z podwodnego drona, nadal istnieje jednak operacyjna konieczność okresowego przekazywania reprezentatywnych próbek danych z sensorów. Dzięki temu operatorzy mogą je analizować, aby w razie konieczności uruchomić inne misje (np. związane z szybkim zniszczeniem już wykrytych min morskich).
Problem pojawia się jednak, gdy podwodne drony są rozłożone na dużej powierzchni, a pozycje niektórych aparatów bezzałogowych są oddalone o nawet 100 km od centrum kierowania. W tym przypadku pojawiają się przede wszystkim ograniczenia związane z łącznością podwodną. Okazuje się bowiem, że zasięg urządzeń łączności podwodnej jest nieprzewidywalny na dużych odległościach poziomych – szczególnie na wodach płytkich, gdzie nie ma stałego (lub przewidywalnego) rozkładu prędkości dźwięku w wodzie. Dodatkowo. standardowe systemy oparte na falach akustycznych mają niewielką szybkość transmisji danych (najczęściej w przedziale kilkudziesięciu bitów na sekundę), co utrudnia przesyłanie tych danych z taką szybkością, by można był szybko zinterpretować informacje z sensorów podwodnych.
Najczęściej stosowanym obecnie rozwiązaniem jest więc analizowanie danych po misji, gdy zostaną one sczytane po wyjęciu dronów z wody. To jednak wiążę się z automatycznym wydłużeniem czasu całej operacji.
To właśnie dlatego Grupa ECA zaproponowała wykorzystanie bezzałogowego statku powietrznego IT180 z opuszczanym „sonarem”. Zastosowano więc rozwiązanie widoczne często na morskich śmigłowcach załogowych, jednak tam taka opuszczana stacja hydroakustyczna służy najczęściej do poszukiwania okrętów podwodnych lub „niewspółpracujących” pojazdów podwodnych.
W systemie grupy ECA wprowadzono dwie zasadnicze zmiany. Po pierwsze, sonar na IT180 służy do komunikacji (transmisji danych akustycznych), tak więc dzięki niemu tworzy się sieć współpracy pomiędzy dronami podwodnymi i dronem powietrznym.
Po drugie, „sonar” wykorzystany przez ECA pracuje na o wiele większych częstotliwościach akustycznych. Powoduje to, że urządzenia – w tym przede wszystkim system antenowy mogą być o wiele mniejsze i lżejsze (poniżej 10 kg). Mogą więc być bez problemu zabrane nawet przez niewielkie bezzałogowe pionowzloty i drony podwodne.
Zastosowanie wysokiej częstotliwości akustycznej pozwala dodatkowo na zwiększenie szybkości transmisji danych pomiędzy pojazdem a pionowzlotem. Oczywiście, teoretycznie istnieje możliwość odebrania przez statek powietrzny sygnału akustycznego wysłanego spod wody. W rzeczywistości, z powodu dużej różnicy w impedancji akustycznej pomiędzy wodą a atmosferą, większa część energii wysłanej nie trafia do anteny odbiorczej na statku powietrznym. Trzeba więc tą antenę odbiorczą zanurzyć w wodzie – i Francuzi zaproponowali właśnie takie rozwiązanie.
Utrzymanie łączności jest w tym przypadku o tyle ułatwione, że pionowzlot IT180 może z łatwością utrzymywać się bezpośrednio nad zanurzonym pojazdem podwodnym, który najczęściej porusza się z prędkością nie przekraczająca 3 w. Jeżeli do tego dołoży się niewielką odległość pionową pomiędzy nadajnikiem na dronie podwodnym i odbiornikiem na pionowzlocie przebywającym ponad nim (drony podwodne poruszają się najczęściej na głębokości kilkanastu-kilkudziesięciu metrów), to wykorzystując wysoką częstotliwość akustyczną można osiągnąć szybkość transmisji danych wynoszącą nawet kilka Mbit/s. Co więcej, szybkość tę można zwiększyć wywołując dron na powierzchnię i tworząc kanał WiFi o jeszcze większej przepustowości (oczywiście, jeśli pozwala na to stan morza).
Zaletą takiego rozwiązania jest dodatkowo dokładniejsze lokalizowanie pojazdów podwodnych. Pojazdy te działając przez wiele godzin pod wodą zasadniczo korzystają z systemu nawigacji inercyjnej. Jest on obarczony stosunkowo dużymi błędami, szczególnie w obecności trudnych do przewidzenia prądów morskich (np. na wodach przybrzeżnych). Stąd pozycja drona jest często korygowana poprzez wysyłanie go, co jakiś czas, na powierzchnię.
W przypadku dronów powietrznych jest o wiele łatwiej, ponieważ tutaj położenie określa się najczęściej za pomocą systemu nawigacji satelitarnej GPS. Po zanurzeniu anteny „sonaru” do wody z tej dokładnej pozycji może również korzystać pojazd podwodny, nie tracąc energii na okresowe wychodzenie na powierzchnię i ponowne schodzenie na głębokość operacyjną (w ten sposób wydłuża się czas trwania misji).
Francuzi podkreślają, że jeden bezzałogowiec powietrzny może bez problemu zabezpieczyć kilka pojazdów podwodnych, przenosząc się po prostu z jednego miejsca na drugie. Co więcej, robi znacznie szybciej niż np. drony nawodne, zapewniając cały czas większą szybkość transmisji danych.
W ten sposób zanurzony „sonar” połączony z system łączności radiowej pionowzlotu IT180 wypełnia lukę, jaka istniała w systemie dowodzenia po zanurzeniu się pojazdu podwodnego, tworząc rzeczywistą sieć komunikacyjną.
Przedstawiciele firmy ECA chcą zaprezentować nowe rozwiązanie już w czasie wystawy Euronaval 2016 w Paryżu. Chcą przy tym pokreślić, że możliwości opuszczanego „sonaru” komunikacyjnego są większe, pozwalając np. na prowadzenie łączności z okrętami podwodnymi lub płetwonurkami wykonującymi prace podwodne lub zadanie bojowe.




























