











- WIADOMOŚCI
BME 2016: "Miniczołg" inspekcyjny do działań podwodnych


Efekt czyszczenia kadłuba z wykorzystaniem robota podwodnego – fot. ECA/M.Dura
W czasie Bałtyckich Targów Militarnych BALT-MILITARY-EXPO grupa przemysłowa ECA zaprezentowała miniaturowego robota podwodnego ROVING BAT, który poza zestawem pędników pozwalających na poruszanie się w toni wodnej, ma również gąsienice.
Francuska grupa przemysłowa ECA znana jest z produkcji bezzałogowych systemów podwodnych, nawodnych i powietrznych. W Gdańsku zwracał jednak szczególną uwagę zdalnie sterowany robot podwodny, który ma rzadko spotykaną w tego typu urządzeniach możliwość poruszania się po płaskich powierzchniach za pomocą gąsienic.

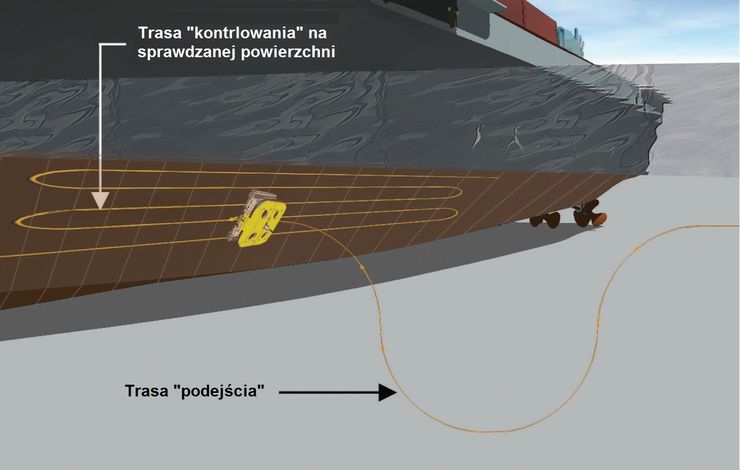
Zadaniem podstawowym ROVING BAT jest wykonywanie inspekcji podwodnych części kadłuba jednostek pływających oraz różnego rodzaju instalacji podwodnych o w miarę płaskich powierzchniach. By sprostać temu zadaniu firma ECA zaproponowała konstrukcję, która może realizować to zadanie z dużą dokładnością, ze ściśle określonej odległości, po szorstkich i nierównych powierzchniach oraz nie pomijając żadnego fragmentu burt i dna.
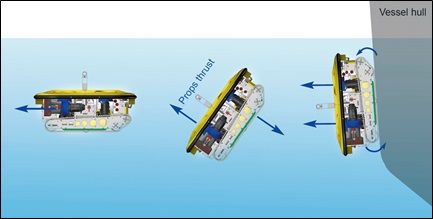
W początkowej fazie operacji robot ROVING BAT porusza się w toni wodnej we wszystkich trzech wymiarach w sposób standardowy, za pomocą układu sześciu pędników. Dzięki temu, w końcowej fazie „podejścia”, można go odpowiednio ustawić w odniesieniu do sprawdzanej jednostki pływającej i „dopchnąć” do burty bez względu na to, jaki ma ona kształt i nachylenie. Po tej operacji zadaniem pędników (szczególnie czterech pionowych) jest już jedynie dopychanie robota do kontrolowanej powierzchni. Natomiast sam ruch do z góry założonej trasy zapewniają mu gąsienice wykonane ze specjalnego tworzywa sztucznego.
W ten sposób ma się pewność, że robot dotrze do każdego fragmentu sprawdzanej powierzchni i nie będzie np. w jakimś momencie zepchnięty z „linii kontrolowania” przez prąd wodny (co się często zdarza w przypadku niewielkich, a więc mało stabilnych, standardowych robotów podwodnych pływających obok sprawdzanych jednostek). Dodatkowo ma się wtedy pewność, że zadanie zostanie wykonane po wcześniej zadanej trasie, bez konieczności powtarzania ruchu, a więc szybciej i pewniej.
Inspekcję standardowo realizuje się z wykorzystaniem kamer zamontowanych na robocie (firma ECA wspomina również o możliwości zastosowania sonarów – np. Didson lub BlueView). Francuzi zakładają również zastosowanie innych czujników, które pozwoliłyby np. na wykonywanie pomiarów zużycia konstrukcji metodami nieniszczącymi NDT (Nondestructive testing). Odszukuje się w ten sposób uszkodzenia strukturalne (np. na spawach i miejscach połączeń), nieszczelności oraz określa stopień postępowania korozji. W przypadku elementów wystających w realizacji tego zadania pomaga ramię manipulatora z pięcioma stopniami swobody.

ROVING BAT może ponadto realizować pewne prace związane np. z czyszczeniem kadłuba. Wykorzystuje się do tego tzw. technologię kawitacyjną - czyli silny strumień pęcherzyków powietrza, które usuwają wszelkie warstwy biologiczne nie naruszając przy tym znajdującej się na kadłubie przeciwporostowej powłoki malarskiej. Wszystkie te zadania można realizować bez konieczności wysyłania pod wodę płetwonurków oraz kosztownego stawiania jednostek pływających na suchy dok.




























