- WIADOMOŚCI
DSEI 2015: Przeciwminowy sonar lotniczy z możliwościami aparatu fotograficznego


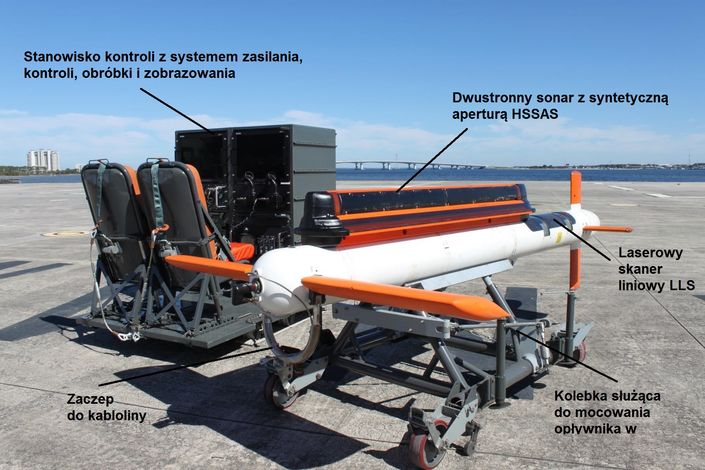
Przewrócony do góry "brzuchem" opływnik systemu AN/AQS-24B oraz stanowiska operatorów systemu. Fot. Northrop Grumman/M.Dura 
Porównanie obrazów z systemu AN/AQS-24 w wersji „A” i „B”. Fot. Northrop Grumman 
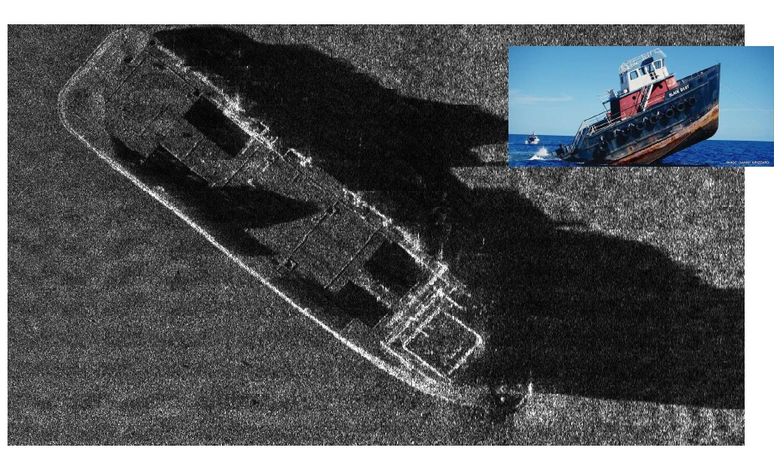
Rozdzielczość AN/AQS-24B jest tak duża, że dzięki temu można zaobserwować przebieg rur na pokładzie zatopionego wraku. Fot. Northrop Grumman 
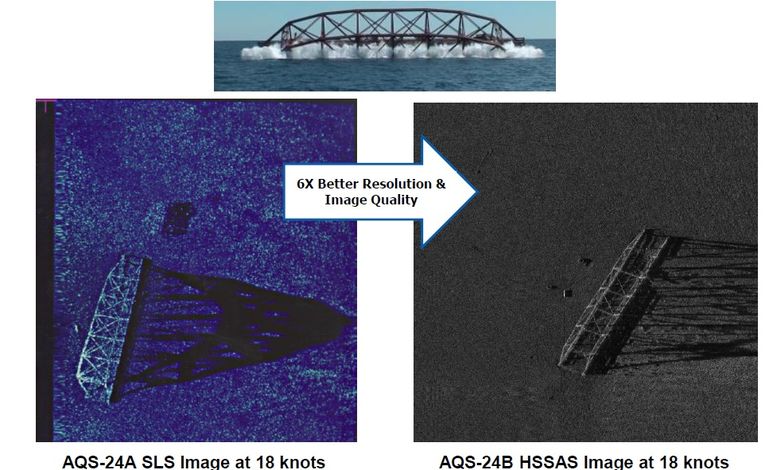
Porównanie obrazów zatopionego filaru mostu otrzymany z systemu AN/AQS-24 w wersji „A” i „B” przy prędkości 18 w. Fot. Northrop Grumman 
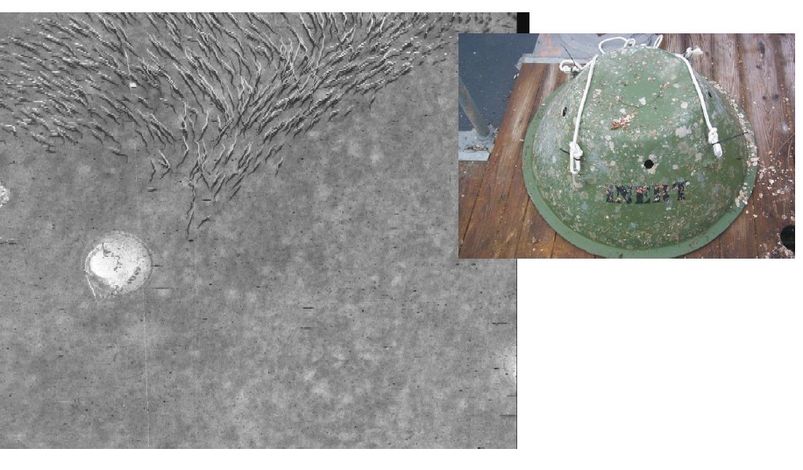
Laserowy skaner liniowy LLS pozwala nawet na odczytywanie napisów na minie dennej. Fot. Northrop Grumman 
Proponowany przez koncern Raytheon system przeciwminowy AN/AQS-20. Fot. M.Dura
Koncern Northrop Grumman zaprezentował w czasie targów DSEI w Londynie nową wersję lotniczego systemu przeciwminowego AN/AQS-24, która pozwala na bardzo szybkie tworzenie obrazu dna morskiego z rozdzielczością porównywalną do aparatu fotograficznego.
Nowa wersja systemu oznaczona jako „Bravo” (AN/AQS-24B) jest przeznaczona dla śmigłowców przeciwminowych oraz bezzałogowych i załogowych nawodnych jednostek pływających. Litera „B” oznacza, że w odniesieniu do wersji AN/AQS-24A dokonano istotnych zmian, które poprawiły proces wykrywania, klasyfikacji i identyfikacji min oraz obiektów podwodnych.

Amerykańska prezentacja w Londynie była o tyle ważna, że w jej trakcie ujawniono przykłady zobrazowania ze wskaźników operatora systemu, które pokazują jak wprowadzone zmiany wpłynęły na możliwości operacyjne całego zestawu. Główna modyfikacja polega na wprowadzeniu nowych technologii do systemu wykrywania w holowanym opływniku, w tym przede wszystkim sonaru z syntetyczną aperturą dużych prędkości (High Speed Synthetic Aperture Sonar (HSSAS) oraz laserowego skanera liniowego LLS (Laser-Line-Scan). Mają one poprawić zdolność systemu do wykrywania, lokalizacji, klasyfikacji i identyfikacji obiektów znajdujących się w wodzie i na dnie.
Amerykanie wskazują, że poprzedni sonar boczny z wersji „Alfa” dawał również dobrą rozróżnialność, ale w obecnym modelu systemu jeszcze bardziej urealniono obraz (sześciokrotnie poprawiając rozdzielczość), zwiększając dodatkowo zasięg i prędkość, z jaką można prowadzić obserwację. Dzięki nowemu sonarowi wraz systemowi obróbki można obecnie przeszukiwać akwen z prędkością 18 w, a więc szybciej niż porusza się większość okrętów przeciwminowych. Wcześniej, z wersją AN/AQS-24A, było to możliwe jedynie przy prędkościach do 8-11 w.

Prace nad sonarem lotniczym w koncernie Northrop Grumman trwały tak naprawdę od 2005 r. Rywalem koncernu był m.in. koncern Raytheon, który wcześniej dostarczał dla amerykańskich śmigłowców lotnictwa morskiego system przeciwminowy AN/AQS-20 z antenami sonaru obserwacji bocznej rozmieszczonymi po obu burtach opływnika.

W zestawie AN/AQS-24A, opracowanym przez koncern Northrop Grumman, zastosowano już sonar z syntetyczną aperturą zamontowany w module podwieszonym pod opływnikiem. Pierwsze cztery takie systemy weszły na wyposażenie V Floty we wrześniu 2013 r. Około 2010 r. zaczęto pracować nad wersją „Bravo”. W 2014 r. były gotowe już dwa prototypy, które zaczęto testować przede wszystkim z wykorzystaniem niewielkich, nawodnych jednostek pływających (w tym systemów bezzałogowych). W tej chwili zakończono testy akceptacyjne, prowadzone przez amerykańską marynarkę wojenną, i dopuszczono system do wykorzystania operacyjnego.

Produkcję rozpoczęto od zestawów modernizacyjnych dla już wprowadzonych i wykorzystywanych systemów (obejmują one m.in. moduł z anteną sonaru HSSAS podwieszaną pod opływnikiem oraz nowy system dowodzenia i kontroli). Jednocześnie zaczęto prace nad wersją „C” (pierwsze pieniądze na ten cel rząd amerykański przeznaczył w 2014 r.), która ma zawierać dodatkowo dziobowy sonar wielowiązkowy. Ma on pozwolić na pokazanie również obrazu sytuacji znajdującej się przed opływnikiem, a nie tylko z jego boków (ma to być jednoznaczne m.in. z pewnym wykrywaniem za jednym przejściem zarówno min kotwicznych, jak i dennych) - wszystko przy zachowaniu maksymalnej prędkości operacyjnej 18 w. Zakłada się, że system AN/AQS-24C będzie gotowy w 2017 r.
Nowe możliwości identyfikacji obiektów podwodnych
W przypadku sonaru HSSAS pojawiły się zupełnie nowe możliwości w procesie klasyfikacji i identyfikacji obiektów podwodnych. I nie chodzi tu tylko o ponad sześciokrotnie lepszą rozróżnialność detali rzeczy znalezionych w toni wodnej lub na dnie, ale o pojawienie się nowych cech przydatnych w wykrywaniu min.
Dobrym przykładem takiego postępu jest identyfikacja min kotwicznych z możliwością bardzo dokładnego rozróżnienia bloku „kotwicy”, minliny, samej miny i cienia rzucanego na dno przez minę.

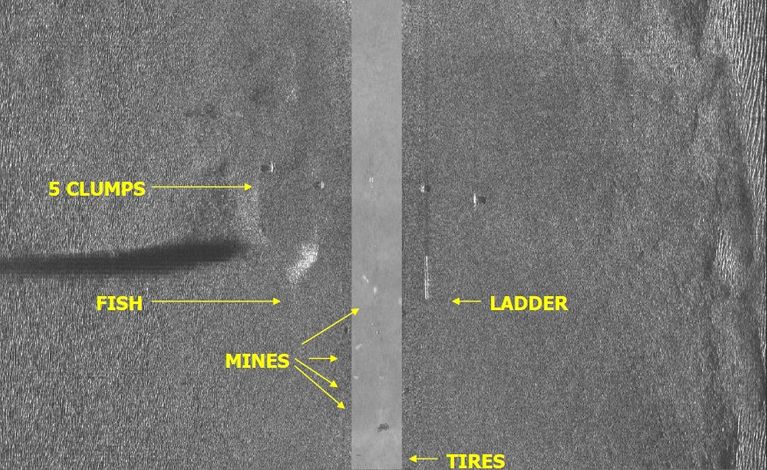
Wraz z sonarami HSSAS pojawiły się również zupełnie nowe możliwości w identyfikowaniu obiektów podwodnych. By to zaprezentować koncern Northrop Grumman wykorzystał miejsce zatopienia przęsła mostu koło miejscowości Panama City na Florydzie (most zatopiono m.in. by utworzyć miejsce dla ryb). Obraz z systemu AN/AQS-24B nie tylko pokazuje więcej szczegółów samego mostu, ale również pozwala na wykrycie niewielkich obiektów lezących obok – szczególnie tych, które wcześniej były w „rozmytym cieniu” z systemu AN/AQS-24A. Dzięki takiej jakości obrazom można odszukać miny denne, które przeciwnik specjalnie będzie się starał ukryć umieszczając je między innymi obiektami podwodnymi – np. skałami lub śmieciami.
Eliminacja pasa nierozpoznanego przez anteny boczne
Ważną cechą systemu AN/AQS-24B jest wyeliminowanie strefy słabej widoczności znajdującej się pomiędzy strefami obserwowanymi przez szyki antenowe rozmieszczone na prawej i lewej burcie modułu sonaru HSSAS podwieszonego pod opływnikiem. To niepożądane zjawisko powoduje, że na połączonym obrazie z obu anten pośrodku jest zawsze szeroki pas nierozpoznanego terenu (widoczny np. na przedstawionym w artykule obrazie min kotwicznych). Zmusza to śmigłowiec lub jednostkę nawodną do powtórzenia poszukiwania tego miejsca – tak by zostało ono objęte wiązką jednej z anten bocznych.
Obecnie udało się to wyeliminować po nałożeniu na obraz sonaru HSSAS, zobrazowania otrzymanego z laserowego skanera liniowego LLS. Jest to urządzenie wykorzystujące laser na ciele stałym, z zielonym światłem o długości fali 532 nm. Dzięki specjalnemu systemowi optycznemu wiązka laserowa jest przesuwana w poprzek toru ruchu w kącie 70°. Wszystkie możliwości LLS nie są jeszcze wykorzystane, ale jak na razie wskazuje się również na zdolność do odczytywania napisów umieszczonych na obiektach podwodnych.
Likwidacja pasa środkowego, który jest zawsze obecny w sonarach obserwacji bocznej powoduje, że platforma holująca obiekt musi zrobić mniej nawrotów by dokładnie przeszukać dany akwen. Łącząc to z większą prędkością przeszukiwania (18 w) widać, że jest to system dający możliwość sprawdzenia rejonu w znacznie krótszym okresie i przy mniejszych nakładach finansowych.