











- WIADOMOŚCI
Polskie bezzałogowe systemy przeciwminowe zdają kolejny egzamin


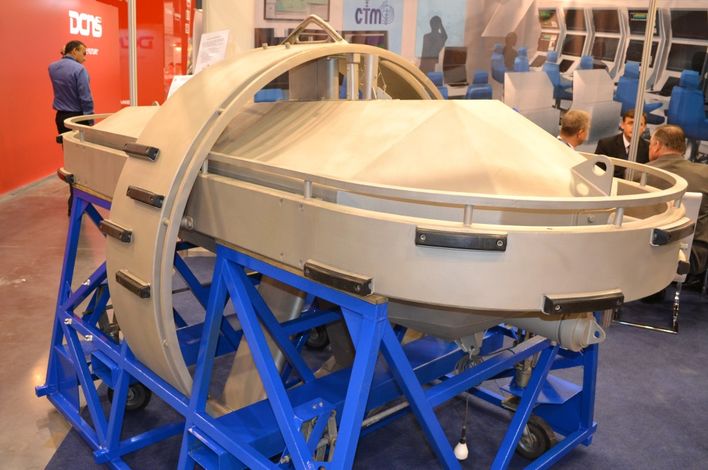
Platforma sensoryczna opracowana i przetestowana przez OBR CTM S.A. Fot. OBR CTM S.A. 
Autonomiczna Platforma Nawodna opracowana przez OBR CTM S.A. – fot. OBR CTM S.A. 
Edredon był pierwszym, polską autonomiczną platforma nawodną, która mogłaby być wykorzystana do działań przeciwminowych. Fot. M.Dura 
Polska specjalność – rodzina zdalnie sterowanych ładunków wybuchowych do niszczenia min Toczek B (z przodu), Toczek A i Toczek C. Fot. M.Dura 
W czasie prób na Zatoce Gdańskiej sprawdzono m.in. niemiecki, samobieżny ładunek wybuchowy SeaFox jednorazowego użytku. Fot. M.Dura
Na przełomie sierpnia i września br. na Zatoce Gdańskiej i w laboratoriach Ośrodka Badawczo-Rozwojowego Centrum Techniki Morskiej S.A. (OBR CTM S.A.) w Gdyni odbyły się udane, międzynarodowe próby nowych systemów poszukiwania i zwalczania min morskich. W trakcie badań polskie rozwiązania jeszcze raz potwierdziły, że mogą być z powodzeniem wykorzystane w naszej Marynarce Wojennej. Pod warunkiem, że ktoś je będzie chciał dalej badać i zamówić.
W badaniach prowadzonych od 24 sierpnia do 18 września 2015 r. (Polska - reprezentowana przez OBR CTM S.A. była krajem-gospodarzem testów) sprawdzono systemy opracowane w ramach projektu BURMIN („Buried Mines”), który jest częścią szerszego programu realizowanego przez Europejską Agencję Obrony EDA (European Defence Agency). BURMIN ma na celu dokonanie oceny bezzałogowych systemów morskich przydatnych w działaniach morskich – w tym przede wszystkim w operacjach przeciwminowych („European Unmanned Maritime Systems (UMS) for Mine Counter Measures and other naval applications)”.

W tym celu utworzono konsorcjum zadaniowe, któremu lideruje firma Thales Underwater Systems z Francji, i w którym poza Polską (reprezentowaną przez OBR CTM S.A.) uczestniczy jeszcze Belgia (RMA), Holandia (TNO) i Niemcy (WTD-71, Atlas Elektronik, Fraunhofer oraz IPHT). Program BURMIN jest o tyle innowacyjny i ważny, że ma za zadanie: znaleźć sposób na wykrywanie min morskich dennych i zagrzebanych oraz określić standardy, które byłyby wspólne dla różnych, przyszłych systemów realizujących tą misję.

OBR CTM S.A. jest w tym przypadku w o tyle dobrej sytuacji, że ma duże osiągnięcia - zarówno jeżeli chodzi o wykrywanie min (proponując stabilizowaną względem dna platformę sensoryczną), jak i ich niszczenie (proponując MLM - Modułowy Lekki Trał Niekontaktowy oraz zdalnie sterowane ładunki wybuchowe TOCZEK M).
Sposób na miny denne i zagrzebane
Zarówno platforma sensoryczna, jak i trał MLM opracowane przez OBR CTM S.A. wywodzą się z tego samego założenia, zgodnie z którym większą skuteczność wykrywania i trałowania można osiągnąć wtedy, gdy zastosuje się układ trałowy lub detekcji o zmiennej głębokości holowania, a więc „zbliżając” sensory i efektory do miejsca, gdzie może znajdować się mina morska.
Chcąc przy tym zachować odpowiednie bezpieczeństwo zakłada się wykorzystanie zestawów, które byłyby przenoszone lub holowane przez nawodne systemy bezzałogowe. Zastosowanie wspólnych standardów da przy tym możliwość łączenia międzynarodowych rozwiązań, czego przykładem może być współdziałanie polskiego systemu trałowego MLM z bezzałogową platformą nawodną - katamaranem „Sterren Du” - zbudowaną przez francuski koncern stoczniowy DCNS, spełniającą rolę holownika.

Jeżeli chodzi o efektory, to w próbach wrześniowych w ubiegłym roku oceniano systemy: działające pośrednio, poprzez wzbudzenie zapalników min (trały), a w bieżącym roku - działające bezpośrednio – stosując samobieżne ładunki wybuchowe jednorazowego użytku typu SeaFox (opracowane przez Atlas Elektronik) lub bezprzewodowo sterowane ładunki wybuchowe TOCZEK M (OBR CTM S.A.) - przenoszone przez niemiecki, bezzałogowy pojazd podwodny SeaOtter (Atlas Elektronik).

W przypadku sensorów dokonano oceny możliwości podwodnej „platformy sensorycznej”, która również działała zdalnie sterowana przez operatorów, znajdujących się w czasie prób na małej platformie załogowej; docelowo przewiduje się holowanie jej przez Autonomiczną Platformę Nawodną (APN).
Oba typy sprawdzanych rozwiązań mają:
- zwiększyć możliwości zwalczania zagrożenia minowego na wodach płytkich – charakterystycznych dla Południowego Bałtyku;
- ograniczyć koszty i zwiększyć bezpieczeństwo prowadzenia operacji przeciwminowych poprzez zastosowanie platform bezzałogowych sterowanych z jednostek dedykowanych lub niededykowanych jednostek pływających doraźnie przystosowanych do tego celu (np. okręty patrolowe lub nawet mobilizowane jednostki cywilne);
- zwiększyć bezpieczeństwo poprzez odsunięcie ludzi poza akwen zagrożony minami (wszystkie operacje wykonują zdalnie sterowane bezzałogowe systemy przeciwminowe).
Zastosowanie tego rodzaju rozwiązań jest w Polsce stosunkowo łatwe, ponieważ posiadamy w kraju odpowiedni potencjał badawczy i przemysłowy dla opracowania i produkowania dla Marynarki Wojennej krajowych platform bezzałogowych. Przykładem tego rodzaju rozwiązań może być chociażby samobieżny ładunek wybuchowy jednorazowego użytku Głuptak, czy robot podwodny Ukwiał. Zastosowanie własnych rozwiązań pozwoli dodatkowo na zbudowanie jednolitego i niezależnego systemu wsparcia logistycznego.

Cel na dzisiaj – APN - Autonomiczna Platforma Nawodna
Programy operacyjne dotyczące sił morskich muszą być jednak koordynowane i realizowane bez opóźnień, ponieważ są one najczęściej ze sobą bardzo mocno powiązane. I tak, rozwiązania z zakresu modułów OPM opartych na platformach nawodnych, proponowanych do budowy w ramach projektu APN, powinny być wykorzystane przy projektowaniu okrętów patrolowych z funkcją zwalczania min „Czapla” (i odwrotnie).
Natomiast niszczyciele min Kormoran II można przystosować do kierowania zdalnie autonomicznymi platformami nawodnymi APN, które holowałyby Modułowy, Lekki Trał Niekontaktowy (UMS EDA MLM) lub sensoryczną platformę podwodną (opracowaną w ramach programu UMS EDA BURMIN).
Problemem jest jednak brak gotowej platformy APN, która byłaby zdolna do realizowania tego rodzaju zadań. Jak dotąd tylko cztery państwa zbudowały zdalnie sterowane jednostki nawodne zdolne do holowania modułowych trałów: Francja, Niemcy, Stany Zjednoczone i Wielka Brytania. W przypadku Polski poważne prace w tej dziedzinie niestety zostały zastopowane.
Polski APN w zamrożeniu
Prace nad polskim APN rozpoczęły się razem z programem strategicznym „Bezzałogowe Morskie Platformy Nawodne i Podwodne (BMPNiP)” - rekomendowanym przez Radę Uzbrojenia MON w 2010 roku. W grudniu 2012 r., na zamówienie NCBR (Narodowego Centrum Badań i Rozwoju) konsorcjum (Akademia Marynarki Wojennej, Politechnika Gdańska, OBR Centrum Techniki Morskiej S.A. (lider) i ITTI Sp. z o.o.) opracowało Studium Wykonalności Programu Strategicznego na rzecz bezpieczeństwa i obronności państwa pt. „Bezzałogowe morskie platformy nawodne i podwodne wspomagające działania okrętów OPM i platform niededykowanych w działaniach przeciwminowych”.
Z tego studium wynikało m.in., że „…w Polsce istnieje odpowiedni potencjał badawczy i przemysłowy do zaprojektowania i produkcji bezzałogowych platform morskich”. Na zlecenie resortu obrony w styczniu 2013 r. konsorcjum o takim samym składzie jak w 2012 r. opracowało Pełne Studium Wykonalności (PSW) Programu Strategicznego na rzecz bezpieczeństwa i obronności państwa pt. „Bezzałogowe morskie platformy nawodne i podwodne wspomagające działania okrętów OPM i platform niededykowanych w działaniach przeciwminowych”.

PSW zostało przyjęte bez zastrzeżeń przez MON i na wniosek Ministra Obrony Narodowej NCBR uruchomiło w 2013 roku konkurs BiO (Bezpieczeństwo i Obronność), w ramach którego ustanowiono program „Bezzałogowe morskie platformy nawodne i podwodne wspomagające działania okrętów OPM i platform niededykowanych w działaniach przeciwminowych”.
W momencie powołania tego programu, Departament Nauki i Szkolnictwa Wojskowego MON brał pod uwagę ścisłą korelację realizacji ustanowionego programu BMPNiP i projektu rozwojowego „Nowoczesny niszczyciel min Kormoran II” oraz projektów realizowanych w ramach UMS EDA (MLM i BURMIN), w ramach których opracowano wysoko ocenione w kraju i za granicą istotne rozwiązania dla wykorzystania w platformach APN.
Konsorcjum w składzie: Akademia Marynarki Wojennej, Politechnika Gdańska, OBR Centrum Techniki Morskiej S.A. (lider) oraz Politechnika Warszawska i Centrum Techniki Okrętowej jako podwykonawca, złożyło wnioski na wszystkie projekty w ramach programu, które zostały pozytywnie zaopiniowane.
Jednak w związku z ograniczonym budżetem konkursu i zgodnie z rekomendacją dowódcy Marynarki Wojennej podpisano umowę na realizację projektu „Autonomiczne Platformy Nawodne (APN)”, deklarując wolę uruchomienia pozostałych projektów z zastrzeżeniem –„w miarę posiadanych środków finansowych” (te pozostałe projekty to: Autonomiczne Platformy Podwodne (APP); System wykrywania, klasyfikacji, identyfikacji, neutralizacji dla APN i APP; Kierowanie i zarządzanie informacją z platform APN i APP (prototyp Lokalnego Stanowiska Dowodzenia (LSD); Integracja systemów przeciwminowych autonomicznych platform nawodnych i podwodnych).
W marcu 2014 r. konsorcjum przekazało do NCBR wyniki pierwszego etapu tworząc faktycznie WZTT (Wstępne Założenia Taktyczno-Techniczne), a w kwietniu zaprezentowano je Zespołowi Nadzorującemu, powołanemu przez Dyrektora NCBR. Żadne uwagi nie zostały zgłoszone. W połowie ubiegłego roku, podczas otwarcia w CTM laboratorium integracji okrętowych systemów walki zaprezentowano już gotowy kadłub bezzałogowca. Jednakże brak zatwierdzonych WZTT skutkował tym, że we wrześniu 2014 r. decyzją Dyrektora NCBR, wstrzymano finansowanie, co wymusiło przerwanie prac.
Należałoby się teraz zastanowić, czy rozciągnięty w czasie proces zatwierdzania WZTT nie godzi w interes utworzenia polskiej specjalności bezzałogowych platform, w tym platform morskich, a co za tym idzie, czy nie powoduje, że nie ma możliwości ich wytwarzania i dostarczania zgodnie z Programem Modernizacji Sił Zbrojnych RP?




























