











- WIADOMOŚCI
Saab proponuje roboty dla okrętów podwodnych

SUBROV - fot. M.Dura 
SUBROV ma kształt i wymiary torpedy – fot. M.Dura 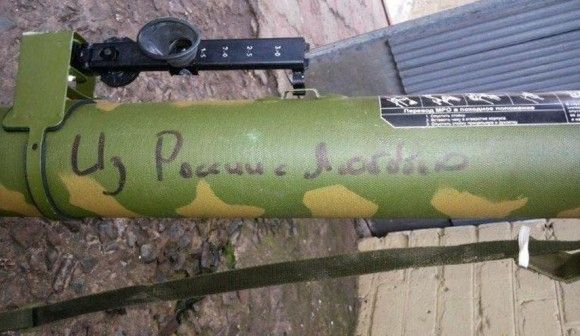
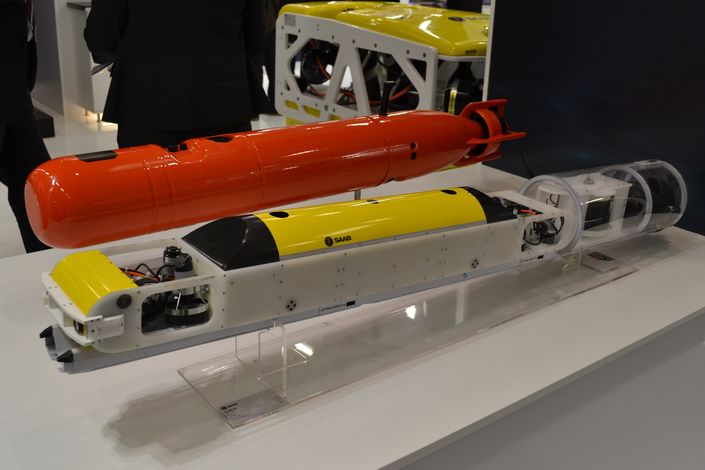
Robot z systemu SUBROV może służyć do odzyskiwania przez okręt podwodny autonomicznych pojazdów podwodnych i torped – fot. SAAB 
W części tylnej SUBROV znajduje się na stałe przyczepiona do szyny nośnej wyciągarka z kablolina oraz blok z systemami elektronicznymi – fot. M.Dura
Szwedzka spółka Saab zbudowała pojazd SUBROV, który może potencjalnie zwiększyć zakres zadań wykonywanych przez zanurzony okręt podwodny.
SUBROV jest systemem ze zdalnie sterowanym pojazdem - ROV (Remotely Operated Vehicle), wykorzystywanym oraz kontrolowanym z okrętu podwodnego. Jest to system kompletny, który może być stosowany z pokładu dowolnej jednostki pływającej, wyposażonej w standardowe wyrzutnie torpedowe kalibru 533 mm.
Konstrukcja i możliwości techniczne SUBROV umożliwiają wykorzystanie m.in.: do wyszukiwania i naprawy usterek w innych jednostkach pływających, wymiany części w instalacjach podwodnych i monitorowania ich stanu technicznego, badania zarówno samego okrętu podwodnego jak i obszaru wokół, działań przeciwminowych, odzyskiwania autonomicznych pojazdów podwodnych oraz wykonywania misji sabotażowych (np. do niszczenia kabli lub rurociągów podwodnych).
Robot może być również stosowany do nawiązania łączności radiowej i podłączenia do podwodnych więzów komunikacyjnych, np. żeby przeprowadzać seans łączności bez ujawniania swojej pozycji. Omawiane zadania SUBROV wykonuje sterowany przewodowo z wnętrza okrętu podwodnego, bez narażania na niebezpieczeństwa członków jego załogi.
SUBROV obsługuje się podobnie jak torpedę i przy pomocy tego samego sprzętu. Nie ma więc potrzeby ingerowania w konstrukcję okrętów podwodnych. System ma kształt i wymiary torpedy, przez co jest łatwy do transportu, przechowywania i montażu na pokładzie. Na szynie transportowej „torpedy” z przodu umieszczony jest sam robot podłączony światłowodem do znajdującej się z tyłu wyciągarki z bębnem oraz bloku z „elektroniką”. To właśnie przez złącza zawarte w bloku oraz przewód zasilający i sygnałowy operator z wnętrza okrętu podwodnego może kontrolować działanie systemu SUBROV, umieszczonego w wyrzutni torpedowej.
Do sterowania i nadzoru robota pilot wykorzystuje konsolę, na której jest również zobrazowana sytuacja uzyskana z sonaru i kamer światła szczątkowego. Przy czym system został tak zaprojektowany, że całe wyposażenie poza konsolą (w tym bęben z kabloliną i wyciągarką) jest w pojemniku, w którym znajduje się robot.

Sterowany przewodowo pojazd posiada sześć systemów kontrolujących położenie, dzięki którym jest wystarczająco zwrotny i stabilny by prowadzić operacji podwodne. Na dziobie robota znajduje się sonar antykolizyjny, kamera światła szczątkowego oraz reflektor. Pod spodem umieszczony jest log dopplerowski, który ułatwia nawigację i określenie położenia pojazdu względem okrętu.
W zależności od potrzeb do robota można podczepiać dodatkowe wyposażenie, np. „lasso” do przechwytywania innych autonomicznych podwodnych oraz torped i pomagające podczas ich wsuwania z powrotem do wyrzutni torpedowej, ramię manipulacyjne do wykonywania różnych prac podwodnych lub przecinak do cięcia kabli podwodnych.

Szwedzki robot mieć zastosowanie zarówno cywilne jak i wojskowe.
Parametry techniczne SUBROV: • Długość kompletnego zestawu - 4500 mm; • Średnica zestawu - 533 mm; • Długość samego robota - 3100 mm; • Wysokość samego robota - 470 mm; • Szerokość samego robota - 470 mm; • Waga całego zestawu na powierzchni – 500 kg; • Maksymalna głębokość użycia - 500 m; • Prędkość podwodna robota - 3 węzły; • Autonomiczność przy wykorzystaniu akumulatorów - 6 godzin; • Zasięg - 6 Mm; • Maksymalny ładunek przenoszony przez robota – 10 kg.
(W.Ljósheim; A.Mrozowicz; N.Pietryka)
























