











- WIADOMOŚCI
DARPA poszukuje algorytmów dla bezzałogowych „terenówek”

Prowadzony przez amerykańską agencję DARPA (Defense Advanced Research Projects Agency) projekt RACER-Sim (Robotic Autonomy in Complex Environments with Resiliency – Simulation) ma na celu stworzenie lub pozyskanie nowych technologii, komputerów oraz algorytmów dla bezzałogowych pojazdów (UGV) poruszających się w terenie. Chodzi o wypełnienie luki pomiędzy symulacją a światem rzeczywistym, jak również znaczne zmniejszenie kosztów rozwoju technologii UGV.
O ile technologia pojazdów autonomicznych rozwijana choćby przez koncerny motoryzacyjne, które poruszają się po drogach publicznych, w rozwiniętej infrastrukturze, według ustalonych zasad/przepisów, poczyniła ogromne postępy, o tyle w złożonych, istotnych z punktu widzenia użytkownika wojskowego warunkach, pojazdy zrobotyzowane wciąż pozostają w tyle za człowiekiem. Chodzi przede wszystkim o prędkość poruszania się w terenie oraz niezawodność w trakcie autonomicznego działania.
Pomimo istnienia odpowiednich platform, pojazdów, które radzą sobie w trudnym terenie, zastosowane do ich sterowania w trybie autonomicznym algorytmy i oprogramowanie często nie są w stanie przetwarzać i reagować na zmieniającą się sytuacje na tyle dobrze, aby utrzymać niezbędną prędkość i nadążać za żołnierzami w trakcie realizacji zadań/misji.
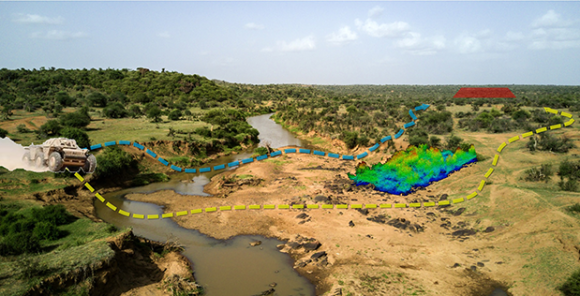
Co prawda ostatnia dekada przyniosła wzrost wykorzystania symulacji w bezzałogowych platformach operujących „w polu”, to jednak środowisko, w którym działać muszą wojskowe lądowe platformy jest szczególnie trudne i złożone. Komputery muszą odtworzyć trójwymiarowe powierzchnie, rodzaje podłoża i roślinność (w tym jej gęstość) oraz setki różnego rodzaju przeszkód. Oprogramowanie musi również uwzględniać niższą wierność odtworzenia terenu lub ograniczone dane mapowania, unikatowe interakcje pomiędzy platformą a podłożem (np. przyczepność, opory toczenia), planowanie ciągłości ruchu oraz brak zdefiniowanych sieci drogowych i zasady według jakich możne poruszać się pojazd.
Aby osiągnąć cele programu RACER-Sim w zakresie zwiększonej szybkości i odporności, musimy zastosować metody uczenia się, które automatycznie dostrajają parametry systemu w czasie rzeczywistym.
W ciągu czterech lat w ramach programu mają zostać opracowane nowe rozwiązania algorytmów, które powinny umożliwić maksymalne wykorzystanie danych z sensorów oraz uwzględniać ograniczenia mechanicznych bezzałogowych platform UGV. Opracowywaniu nowych technologii towarzyszyć mają prowadzone przez DARPA testy w różnych warunkach terenowych. Agencja ma również zapewnić do testów zaawansowane platformy UGV, które będą wykorzystywane przez zespoły badawcze w trakcie rozwijania możliwości oprogramowania w zakresie sterowania autonomicznych pojazdów poprzez powtarzane cykle symulacji i testów „w terenie”.
Skuteczne oprogramowanie wyodrębni funkcje z danych z czujników i wykorzysta te informacje do podejmowania decyzji dotyczących jazdy
Cele programu RACER obejmują nie tylko algorytmy autonomii, ale także tworzenie środowisk symulacyjnych, które będą wspierać szybki rozwój możliwości autonomicznego poruszania się dla przyszłych platform UGV.














WIDEO: F-35 vs. JAK-130 | Fregata tonie | Kuwejt strąca F-15 - Defence24Week #151