











- ANALIZA
- WIADOMOŚCI
Glidery - podwodne drony US Navy. Co przechwycili Chińczycy?


Profil „lotu” podwodnego szybowca Spray. Fot. WHOI 
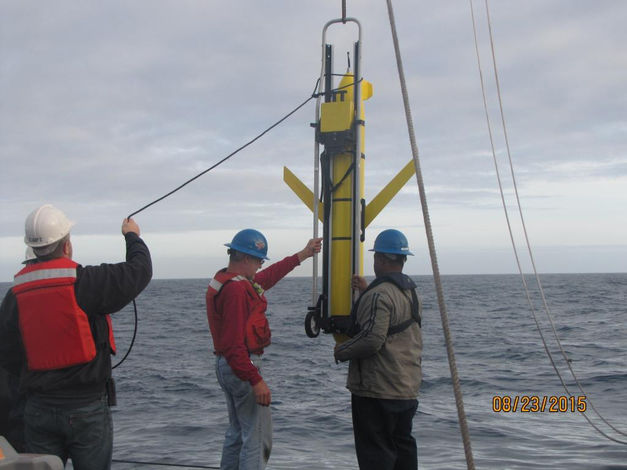
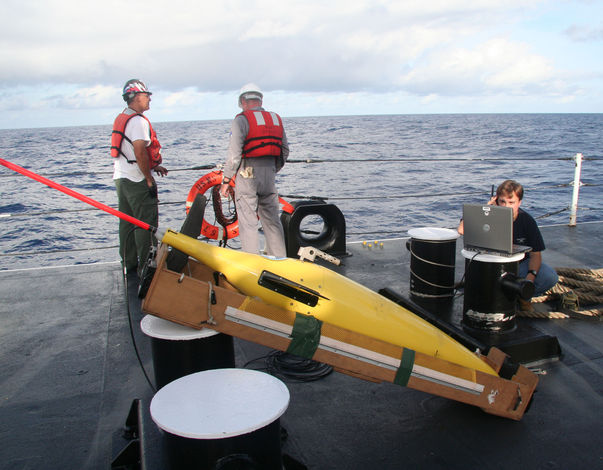
Glider LBS-G przy okręcie badawczym T-AGS 60. Fot. US Navy 
Podwodny szybowiec LBS-G wypuszczony z okrętu badawczego T-AGS 60. Fot. US Navy 
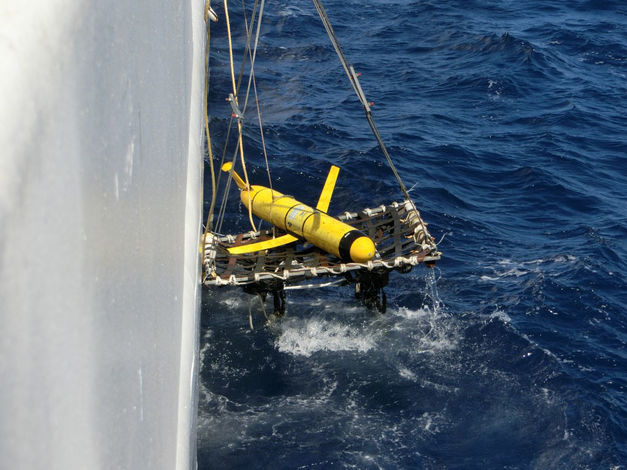
Amerykanie szukają coraz to nowych rozwiązań. Na zdjęciu podwodny szybowiec Ice Dragon przygotowywany na pokładzie okrętu oceanograficznego na USNS „Henson” (T-AGS 63). Fot. US Navy 
Glider Seaexplorer. Fot. M.Dura 
Mechanizm sterowania statecznością i blok akumulatorów w podwodnym szybowcu Seaexplorer. Fot. M.Dura 
Ślady ataku rekina na australijskim szybowcu. Fot. University of Western Australia
Afera z porwaniem amerykańskiego drona Slocum G2 przez Chińczyków sprowokowała Amerykanów do ujawnienia planów rozwoju bezzałogowych pojazdów „szybujących” (gliderów) w amerykańskiej marynarce wojennej. Okazuje się, że mają być one przyszłością oceanografii w US Navy.
Amerykanie przyznali, że zamierzają znacząco zwiększyć liczbę „podwodnych szybowców”, które uznano za system relatywnie tani, a jednocześnie o wystarczająco dużych możliwościach, by zbierać dane potrzebne dla US Navy. Amerykańska marynarka wojenna przyznała, że obecnie wykorzystuje flotę około 130 takich urządzeń. Większość z nich jest stosowana dla potrzeb dowództwa morskiej meteorologii i oceanografii (Naval Meteorology and Oceanography Command).
Jest to o tyle zrozumiałe, że podwodne szybowce są bezzałogowymi pojazdami, które bardzo dobrze nadają się do długotrwałego zbierania informacji o takich parametrach oceanów, jak zasolenie, temperatura i głębokość. Co więcej, są to systemy w pełni autonomiczne, które mogą działać samodzielnie przez wiele miesięcy, korzystając z energii słonecznej i samych oceanów.
Najlepiej wyjaśnił to kontradmirał Tim Gallaudet – dowódca Naval Meteorology and Oceanography Command. Stwierdził on, że „tylko 5% światowych oceanów zostało przebadanych. Te podwodne roboty przebadają więcej oceanów. I szybciej. Tylko za ułamek kosztów wykorzystania załogowych okrętów podwodnych i nawodnych”.
Amerykańska marynarka wojenna wykorzystuje najczęściej „podwodne szybowce” produkowane przez firmę Teledyne Webb. Dane zbierane przez te bezzałogowce są jawne i przesyłane do Biura Oceanograficznego US Navy NAVOCEANO (Naval Oceanographic Office). Na ich podstawie tworzy się wirtualny, cyfrowy model oceanów, wykorzystywane do badań przez naukowców, poszukiwaczy/użytkowników złóż ropy naftowej i gazu oraz oczywiście przez wojskowych.
Pozwala to „lepiej zrozumieć środowisko podwodne dla potrzeb wykorzystania wojskowego”, przewidzieć jak będą przebiegały prądy morskie, jaki będzie rozkład prędkości dźwięku, itd. – czyli wszystko to, co może być przydatne dla jednostek nawodnych, a przede wszystkim okrętów podwodnych.
Gallaudet ujawnił, że kieruje działaniami największej na świecie floty gliderów z biura NAVOCEANO z centrum kosmicznego Stennis (Stennis Space Center) w Missisipi. Biuro to nadzoruje pracę podwodnych szybowców przez 24 godziny na dobę i w przypadku utraty kontaktu z którymś z nich (drogą satelitarną) – wszczyna alarm i wszczyna akcję poszukiwawczą.

Może w tym celu wykorzystać sześć działających na morzu okrętów oceanograficznych – jednostek-matek dla dronów, które na co dzień są kierowane i wspierane przez dowództwo transportu morskiego Military Sealift Command. Informacje otrzymane od gliderów są potem nanoszone na mapy przez naukowców i specjalistów marynarki wojennej.
Takie prace z użyciem „podwodnych szybowców” trwają już ponad 12 lat. Nabrały one jednak naprawdę tempa dopiero po wprowadzeniu w 2012 r. do służby operacyjnej dronów LBS-G (Littoral Battlespace Sensing-Glider) zbudowanych przez firmę Teledyne Brown Engineering Inc.
Jest to stosunkowo tani system, ponieważ jeden „szybowiec” kosztuje około 150000 USD. Tymczasem trzydniowy pobyt na morzu okrętu oceanograficznego to koszt około 180000 dolarów. Dlatego Amerykanie szukają coraz to nowszych rozwiązań konstrukcyjnych i chcą zwiększyć flotę gliderów, wykorzystując ją do jeszcze lepszego zrozumienia mórz i oceanów.
Podwodne szybowce – zasada działania
Idea podwodnych szybowców była rozwijana pod koniec lat osiemdziesiątych przede wszystkim przez Agencję Zaawansowanych Projektów Badawczych w Obszarze Obronności DARPA (Defense Advanced Research Projects Agency) oraz biura morskich projektów badawczych ONR (Office of Naval Research). Pierwszy prototyp glidera został opracowany w 2003 r. przez firmę Webb Research Company i od tego czasu urządzenia tej klasy zaczęły być powszechnie wykorzystywane do badań oceanograficznych.
W 2009 roku doszło do ważnego wydarzenia, ponieważ jeden z podwodnych szybowców zbudowanych przez zespół naukowców z Rutgers University przepłynął samodzielnie ocean potrzebując na to 221 dni. Było to możliwe dzięki umiejętnemu wykorzystaniu prądów morskich, jak również pomysłowej konstrukcji dronów.
Pomimo, ze podwodne szybowce nie mają śrub, to jednak nie są tylko miotanymi przez fale i pływy bojami. Glidery mogą się bowiem samodzielnie poruszać w pionie, poziomie i w kierunku. Dron posiada oczywiście baterie litowo-jonowe, ale są one stosowane tylko do zasilania urządzeń pomiarowych, nawigacyjnych i środków łączności.

Zanurzanie i wynurzanie odbywa się natomiast poprzez układ regulacji wyporności (przetaczający olej mineralny lżejszy od wody ze środka drona do zbiorników zewnętrznych i odwrotnie) oraz wykorzystanie różnicy temperatury wody na powierzchni i na dużych głębokościach.
W przypadku gliderów LBS-G stosuje się rury woskowe, które pod wpływem ciepła na powierzchni rozszerzają się i wyciskają olej ze zbiornika wewnętrznego do zewnętrznego. Wymusza się w ten sposób zmianę pływalności, pomagając dronowi w zanurzeniu. W miarę zwiększania się głębokości, gdy woda jest coraz zimniejsza, wosk ulega kompresji i olej jest z powrotem zasysany do zbiornika wewnętrznego. Powoduje to powolne wznoszenie się szybowca ku powierzchni.
Dzięki takiemu ruchowi glider może się poruszać także niezależnie od prądów morskich. Konstruktorzy znaleźli bowiem rozwiązanie, które beznapędowo pozwala poruszać się również do przodu. Wykorzystuje się do tego siłę nośną, jaka powstaje na skrzydłach-płetwach drona podczas ruchu pionowego. W ten sposób glidery poruszają się torem przypominającym w przekroju pionowym sinusoidę.
Jej kształt - a więc czas trwania cyklu zanurzenia i wynurzania oraz maksymalna głębokość - zależy od konstrukcji drona i wykonywanego przez niego zadania. Za każdym razem, gdy glider wynurza się na powierzchnię (lub co kilka cykli), następuje korekta położenia (za pomocą GPS) oraz transmisja danych do centrum opracowania informacji przy użyciu systemu łączności satelitarnej. Odbywa się to z wykorzystaniem anten łączności i GPS, które najczęściej znajdują się w końcówkach skrzydeł albo w sterze kierunku na rufie.
Ster ten pozwala na korygowanie kierunku, co osiągane jest poprzez zmianę jego położenia względem strumienia wody. Całością zarządza specjalne oprogramowanie dronów, które może regulować prędkość opadania i wznoszenia, pozwala na kontrolowanie prędkości oraz posiada mod niskiego poboru energii. Dzięki tym rozwiązaniom dron może samodzielnie poruszać się z prędkością do około pół węzła nawet przez ponad dwa miesiące.
Każdy szybowiec ma modułową budowę, dzięki czemu można bardzo łatwo wymieniać poszczególne elementy i sensory. Sama firma Teledyne proponuje w swojej ofercie zastosowanie na gliderach m.in.: modemu akustycznego (do kierowania i transferu danych), głębokościomierza, batyfotometru (dla pomiaru bioluminescencji); miernika tłumienia dźwięku, miernika tłumienia optycznego, sensorów PAR (Photosynthetically Active Radiation), miernika nasycenia tlenu; przyrządu do śledzenia głębokości poruszania siłę ławic ryb; fluorometru i czujnika turbulencji. Wszystko to może zostać spakowane do jednego drona o długości najczęściej nie większej niż półtora metra
Ale są również glidery większe, jak np. bezzałogowiec Spray opracowany przez instytut badawczy Scripps oraz instytut oceanograficzny WHOI (Woods Hole Oceanographic Institution) z funduszów biura ONR. Jest on przeznaczony do przeszukiwania oceanów do głębokości 1000 m i na odległościach 2000-3000 km przez 3-4 miesiące.
Są to już drony o długości 2,3 m ze skrzydłami o rozpiętości 1,2 m. Mogą się one poruszać z prędkością 0,5 węzła w pionie i około 0,2 m w poziomie. Zmiana głębokości odbywa się poprzez przetaczanie oleju pomiędzy zbiornikami zewnętrznymi i wewnętrznymi, co zmienia pływalność szybowca. Kontrola zanurzania odbywa się natomiast poprzez przesuwanie akumulatorów wewnętrznych do tyłu i do przodu. Przesuwanie baterii na boki pozwala natomiast kontrolować położenie dronów.
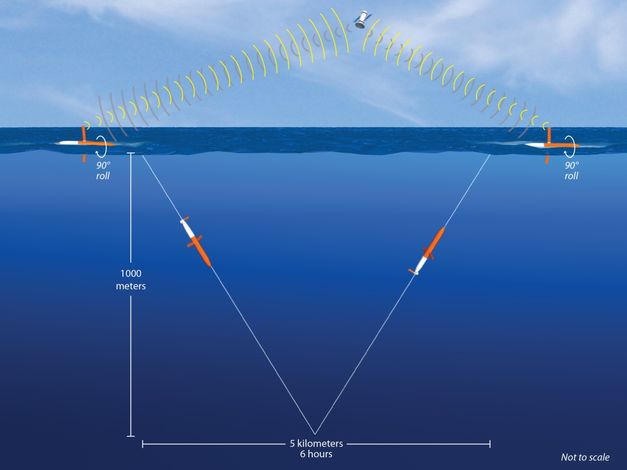
Standardowy cykl pracy rozpoczyna się na powierzchni, gdy antena GPS w jednym ze skrzydeł udokładnia pozycję. Wtedy następuje przetoczenie oleju do wewnętrznego zbiornika, przez co obciążony dziób pochyla się w dół i szybowiec zaczyna „tonąć”. Gdy dron dochodzi do zakładanej głębokości (około 1000 m) włącza się pompa przetaczająca olej do zewnętrznych zbiorników przez co zwiększa się pływalność glidera i rozpoczyna się proces wynurzania.
Pomiary są zbierane w czasie całego cyklu nurkowania. Po dojściu na powierzchnię antena GPS w skrzydle odbiera sygnał pozycji, dron przesyła dane za pomocą sieci satelitarnej Iridium i otrzymuje nowe rozkazy działania. Dane te mogą być wykorzystane np. do korygowania parametrów nawigacyjnych, gdy trzeba zmienić profil pomiaru.


Chińczycy przejmując amerykańskiego glidera chcieli prawdopodobnie sprawdzić, jakie rzeczywiście sensory znajdują się na jego pokładzie, a więc co rzeczywiście mierzyli Amerykanie. Tworzenie dokładnej mapy głębokości i zmieniającego się w pionie zasolenia i temperatury jest bowiem niezbędne dla prawidłowego działania okrętów podwodnych oraz systemów ich zwalczania. Jest więc to działanie typowo wojskowe.
Dodatkowo parametry te zmieniają się wraz z porą roku i te sezonowe zmiany ich wartości muszą być także zarejestrowane i uwzględnione w działalności operacyjnej. Należy bowiem pamiętać, że sygnały akustyczne emitowane przez sonary, jako fale mechaniczne, nie rozchodzą się prostoliniowo, ale są odchylane w zależności od charakterystyki warstw wody, przez jakie przechodzą. By można to było skorygować, konieczna jest znajomość rozkładu prędkości dźwięku w wodzie i do tego glidery nadają się doskonale.
Chińczycy prawdopodobnie stwierdzili, że Amerykanie stosowali typowego szybowca ze standardowym wyposażeniem i dlatego tak szybko go zwrócili. W przeciwnym wypadku procedura przekazania glidera do Stanów Zjednoczonych byłaby na pewno o wiele dłuższa.
























