











- WIADOMOŚCI
ILA 24: europejski skrzydłowy inny niż amerykańskie


Autor. Maciej Szopa/Defence24.pl
Jedną z najważniejszych nowości na targach lotniczych ILA w Belinie jest nowa koncepcja załogowego skrzydłowego przedstawiona przez firmę Airbus. Póki co europejska propozycja jest nazywana po prostu Wingman.
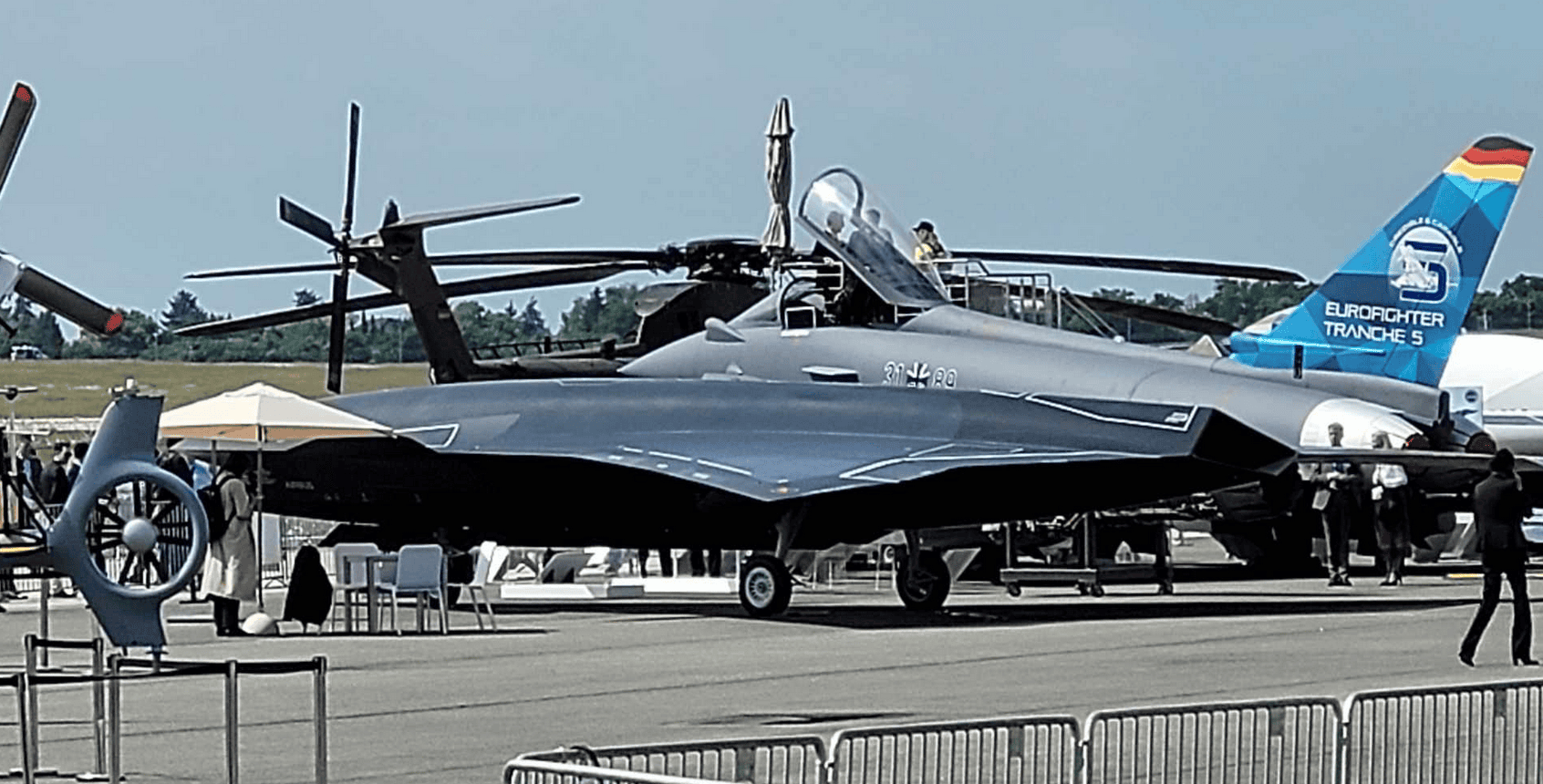
Makietę Wingmana umieszczono obok Eurofightera, dzięki czemu można było porównać gabaryty bezzałogowca z klasycznym samolotem bojowym. Nowa maszyna ustępuje mu wielkością, ale w dość niewielkim stopniu. Jest to więc konstrukcja. która będzie mogła pełnić rolę bezpilotowego odpowiednika dzisiejszego myśliwca, nie zaś niedrogiego, masowo produkowanego projektu przystosowanego do działania w roju. W odwrotną stronę wydaje się zmierzać amerykański program Collaborative Combat Aircraft (CCA), w którym póki co liczebnie przeważają bezzałogowce mniejszych rozmiarów.
Airbus informuje, że Wingman ma działać jako skrzydłowy w „bardzo podobny sposób” jak maszyna załogowa, z tym że będzie ją można wysyłać w obszary podwyższonego ryzyka, podczas gdy samolot załogowy będzie mógł kontrolować prowadzone przez niego zadanie, pozostając we względnie bezpiecznej odległości od przeciwnika.

Autor. Maciej Szopa/Defence24.pl
Nie jest jasne, czy skrzydłowy Airbusa doprowadzi do podwojenia floty bojowych odrzutowców, czy też na jeden samolot załogowy będzie przypadało więcej towarzyszących dronów. Istnieje możliwość, że dojdzie do realizacji drugiego scenariusza, bo celem programu jest zapewnienie odpowiedniej liczebności w wojnie z zaawansowanym technicznie przeciwnikiem.
Przypomnijmy, że Amerykanie roboczo zakładają, iż na każdą maszynę załogową przypadną bo dwa bojowe drony. Rosjanie twierdzą, że jednemu Su-57 będą towarzyszyły cztery S-70 Ochotnik, a Chińczycy przedstawiali wizualizację jednego J-20 z trzema skrzydłowymi FH-97A.
Autor. Maciej Szopa/Defence24.pl
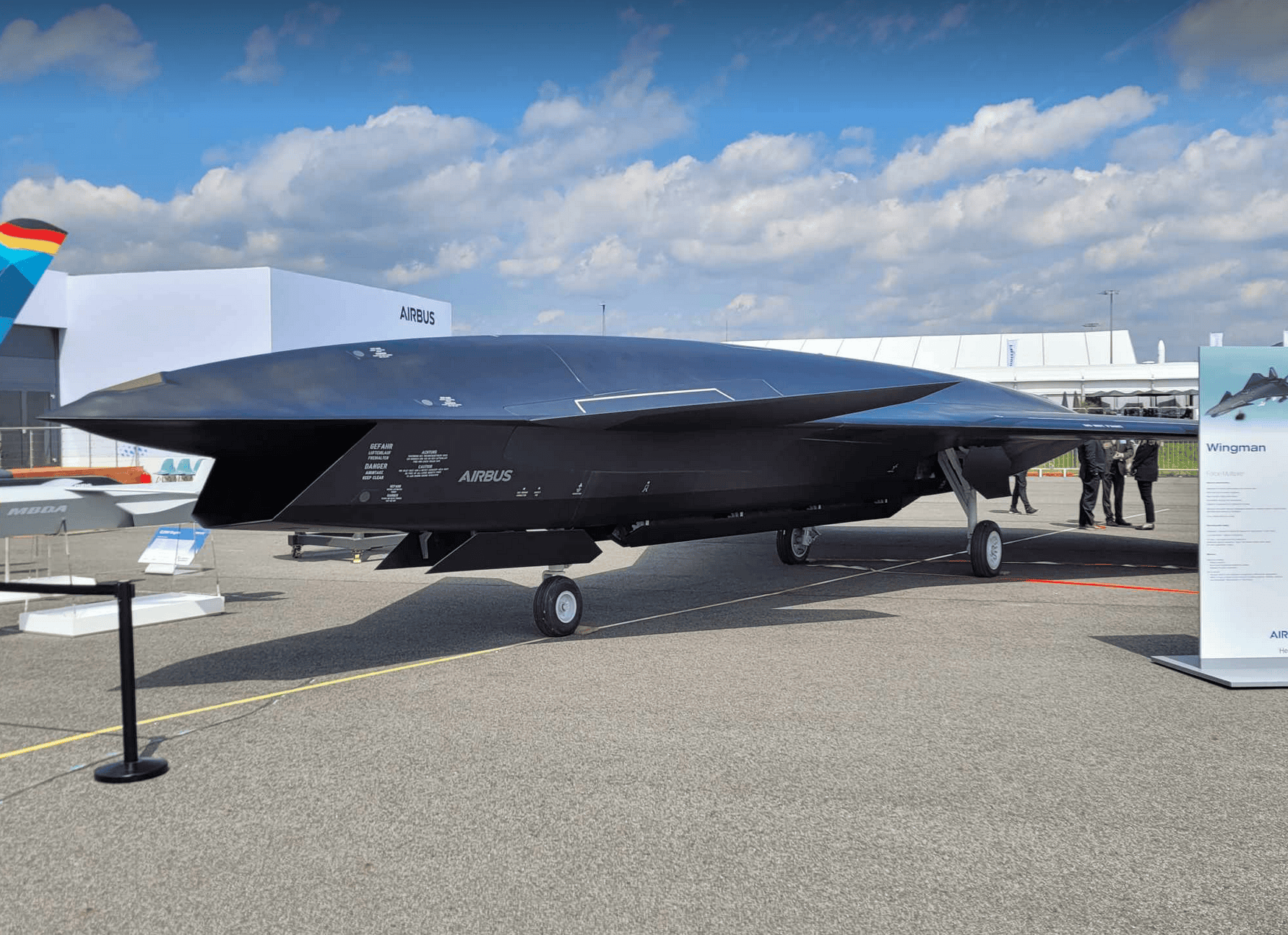
Nowa maszyna Airbusa jest jednosilnikowa, w układzie kaczki, z pojedynczym wlotem powietrza, który przywodzi na myśl niedoszły „uśmiechnięty” myśliwiec Boeinga X-32. Nie posiada pionowych powierzchni sterowych. Zaprojektowano ją z uwzględnieniem cech stealth. Co znamienne, czujniki służące do nawigacji zostały umieszczone nad wlotem powietrza, mniej więcej w tym samym miejscu, w którym w maszynie załogowej znajdowałaby się kabina pilota. Jest to więc sensor, który nie może „patrzeć” na dolną półsferę samolotu. Zapewne to efekt wczesnego etapu, na którym jest program Wingman, zaś docelowo obserwowana będzie mogła być cała sfera wokół samolotu. Maszyna ma być sterowana przez sztuczną inteligencję, ale pozostawać pod kontrolą załogi współpracującego samolotu załogowego.
Uzbrojenie i inne wyposażenie (głownie rozpoznawcze) będzie mogło być przenoszone w kadłubowej komorze uzbrojenia oraz na belkach uzbrojenia pod skrzydłami (przy zignorowaniu cech stealth). Pod te ostatnie będzie można podwiesić także dodatkowe zbiorniki paliwa. Zakładany pakiet misji to m.in. rozpoznanie, misje uderzeniowe na cele lądowe (i zapewne morskie) przy pomocy broni precyzyjnej i naprowadzanych bomb, zwalczanie zagrożeń powietrznych, a także walka radioelektroniczna. Oznacza to, że maszyna ta będzie mogła pełnić także rolę „ciężarówki z amunicją”, czyli maszyny lecącej z tyłu formacji bojowej, być może wspólnie z samolotami załogowymi, której główną rolą jest przenoszenie uzbrojenia na potrzeby pozostałych uczestników misji.
Autor. Maciej Szopa/Defence24.pl
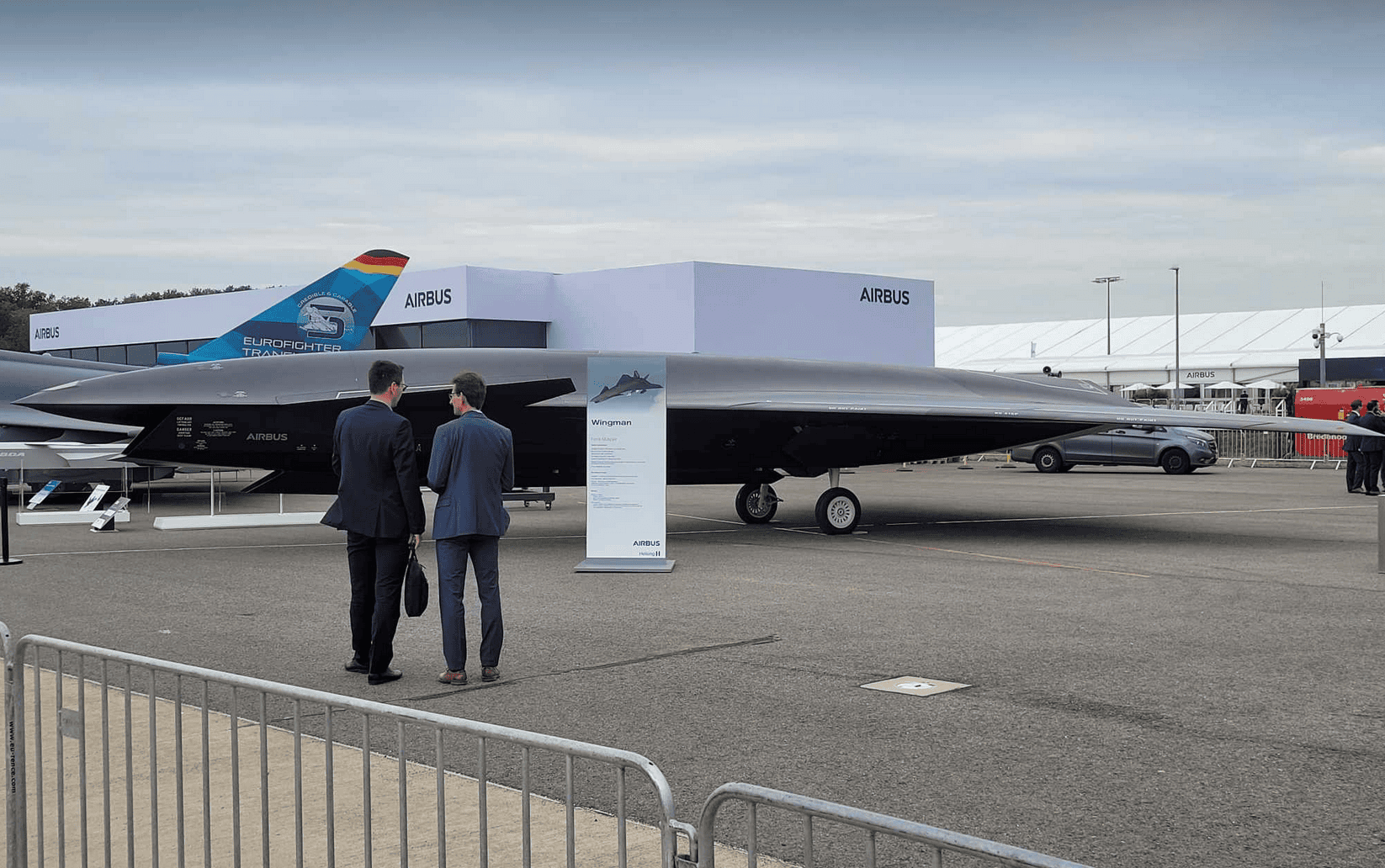
Konstrukcja jest na wczesnym etapie rozwoju, co przyznaje sam Airbus. Ma to być rozwiązanie „na lata 30.”, zatem projekt ma zbliżony horyzont czasowy do niemiecko-francusko-hiszpańskiego programu FCAS/SKAF. Jednak skrzydłowy ma się pojawić nieco wcześniej. Jak zapewnia Airbus, będzie istniała możliwość jego współpracy także z myśliwcami Eurofighter Typhoon.
Wingman ma osiągać prędkość okołodźwiękową, posiadać modułową konstrukcję i zdolność do wszechstronnego dostosowania do realizacji konkretnych zadań. Ma być tez możliwy do złożenia po przywiezieniu w rejon działań bojowych w ciągu kilku godzin, co oznacza możliwość przerzutu strategicznego (choćby Airbusem A400M Atlas) drogą powietrzną. Ma być także zdolny do operowania z przygodnych lądowisk i drogowych odcinków lotniskowych.
Autor. Maciej Szopa/Defence24.pl




























